
 数据结构
数据结构 网络
网络 关系数据库管理系统
关系数据库管理系统 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 编程
C 编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP什么是磁放大器?– 结构、工作原理和应用
磁放大器是一种交叉磁场机器。交叉磁场机器是一种特殊的直流电机,在直轴或 d 轴上有一组额外的电刷。这种电刷布置使得能够利用电枢磁动势提供大部分励磁并实现高功率增益。
磁放大器的结构和工作原理
通过在直轴或 d 轴上增加一对电刷,可以将普通的直流发电机转换为磁放大器(参见图)。位于正交轴或 q 轴上的电刷短路,机器的输出从 d 轴电刷获得。定子包含一个控制励磁绕组。励磁电流 $𝐼_{𝑓}$ 流过控制励磁绕组。
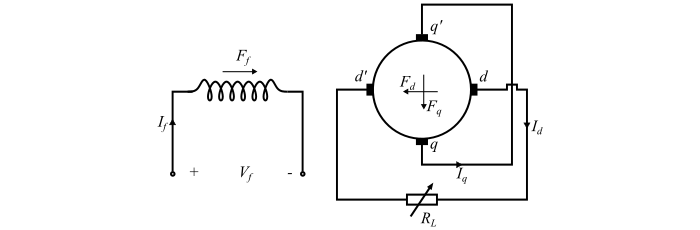
当机器的转子以恒定速度旋转时,控制励磁绕组的磁动势 (𝐹𝑓) 在 q 轴电刷 qq’ 之间感应出电动势 𝐸𝑞。该感应电动势由下式给出:
$$\mathrm{𝐸_{𝑞} = 𝐾_{𝑞𝑓}𝐼_{𝑓} … (1)}$$
其中,$𝐾_{𝑞𝑓}$ 为常数。
由于电刷 qq’ 短路,因此会流过 q 轴电枢电流 (𝐼𝑞) 并建立 q 轴磁动势 (𝐹𝑞)。由于短路路径的阻抗非常低,因此,控制励磁绕组中只有很小的励磁电流 (𝐼𝑓) 就能产生更大的 q 轴电枢电流。相应的磁通密度波将以 q 轴为中心。由于换向器的作用,该磁场在空间中是静止的。电枢在其在静止的 q 轴磁通中旋转时,会在电枢中感应出电动势。该产生的电动势出现在 d 轴电刷 dd’ 两端,由下式给出:
$$\mathrm{𝐸_{𝑑} = 𝐾_{𝑑𝑞}\:𝐼_{𝑞} … (2)}$$
其中,𝐾𝑑𝑞 为常数。
现在,如果将电阻为 𝑅𝐿 的负载连接到 d 轴电刷上,则 d 轴电枢电流 (𝐼𝑑) 将流过负载。该电流产生 d 轴磁动势 (𝐹𝑑)。根据楞次定律,d 轴磁动势 (𝐹𝑑) 反对其产生的原因,即控制磁场磁动势 (𝐹𝑓)。
电压产生的每个阶段都会产生一个电流,其磁场领先于产生电压的磁通波 90°。由于电压产生有两个阶段,因此 d 轴输出电流的磁动势偏移两次 90°,即 180°,因此与控制磁场磁动势 (𝐹𝑓) 相反。因此,q 轴产生的电动势变为:
$$\mathrm{𝐸_{𝑞} = 𝐾_{𝑞𝑓}\:𝐼_{𝑓} − 𝐾_{𝑞𝑑}𝐼_{𝑑} … (3)}$$
如果忽略磁饱和,并且假设机器的速度恒定,则 𝐾𝑞𝑑 为常数。
对于给定的控制磁场磁动势 (𝐹𝑓) 和负载电阻,将达到 𝐼𝑑 和 𝐼𝑞 的稳态值。
从公式 (3) 可以看出,电流 𝐼𝑑 的任何增加都会降低电动势 𝐸𝑑 的值。这反过来又会降低电流 𝐼𝑑。因此,𝐸𝑑 和 𝐼𝑑 都会降低。因此,对于给定的控制励磁电流值 (𝐼𝑓),d 轴输出电流 (𝐼𝑑) 在较宽的负载变化范围内保持恒定。因此,以上讨论表明,磁放大器表现为恒流发生器。
磁放大器的应用
磁放大器主要用于以下应用:
为过程控制电机提供直流电源
为大型交流发电机的励磁系统供电
牵引系统和沃德-伦纳德调速系统等。
目前,磁放大器已不再生产,已被固态功率放大器取代。

2K+ 次浏览
