
 数据结构
数据结构 网络
网络 关系型数据库管理系统
关系型数据库管理系统 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 语言编程
C 语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP什么是机器人宇航员?它将来可以取代宇航员吗?
Robonaut 是 NASA 的一个机器人,设计成人形。人工智能使 Robonaut 更容易完成与人类相同的工作。Robonaut 可以帮助完成从国际空间站的工作到探索其他世界的任何事情。Robonaut 系列背后的核心思想是让一个类人机器与宇航员一起工作。它的外形尺寸和灵活性设计成 Robonaut 可以使用太空工具并在类似于宇航员的相同环境中工作。
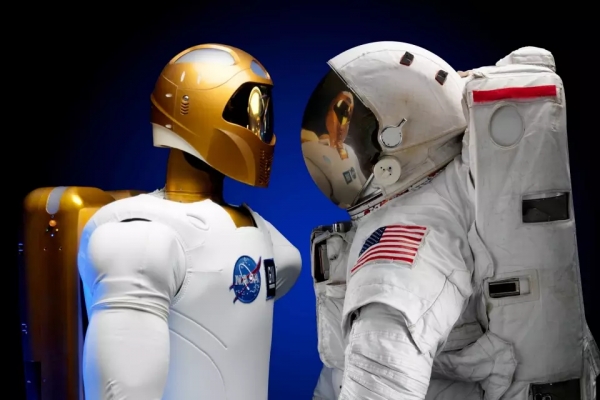
这些新的太空探索者不需要宇航服或氧气就能在飞船外生存。因此,它们可能有助于节省时间和人类生命,同时提高任务效率。人类太空探索的问题在于,人体对于太空的恶劣环境来说太脆弱了。太空中的温度可以在 120 摄氏度到 -100 摄氏度之间变化。此外,地球的大气层也不能保护我们免受太阳辐射。为了生存,宇航员必须穿着笨重的宇航服。宇航服在紧急情况下并不实用,例如国际空间站 (ISS) 被物体撞击并需要立即修理的情况。
Robonaut 1
Robonaut 1 (R1) 是第一个型号。R1B 是 R1 的便携式版本。其中之一是 Zero-G 腿,如果 Robonaut 在空间站工作,它将使用外部扶手攀爬,然后使用它的零重力腿使用 WIF 插座固定在空间站上。另一个是机器人移动平台,它是一个带有两个轮子的底座,使用 Segway PT。还有 2006 年开发的四轮 Centaur 1。
Robonaut 2
R2 的速度比 R1 快四倍以上,更紧凑,更灵活,并且包含更深更广的传感范围。它可以以高达 2 m/s 的速度移动手臂,有效载荷为 40 磅,并且其手每根手指的抓握力约为 5 磅。机器人中有超过 350 个传感器和 38 个 PowerPC 处理器。
空间站机组人员将能够像地面控制器一样操作 R2;两者都可以使用远程呈现来操作。与上一代 Robonaut 相比,改进之一是 R2 不需要持续的监督。为了应对未来目的地(由于距离和时间延迟,持续管理存在问题)的预期,R2 被设计为设置为任务,然后自主执行任务,并定期进行状态检查。
Robonaut 2 的升级
增强的力觉传感器
更大的运动范围
更高的带宽
改进的灵活性
R2 集成的机电一体化设计导致更紧凑、更强大的分布式控制系统,其布线仅为原始 Robonaut 的一小部分。
模块化在硬件和软件中普遍存在,以及用于传感和控制的创新和分层方法。

用户界面
R2 界面使用按钮和滑块等常用元素,为用户提供对机器人基本功能的直接控制。
该界面使用监控的网络链接来接收来自系统的遥测、事件和状态更新,并将命令发送到机器人。
屏幕界面是可配置的,允许操作员将显示器移动到适合当前任务的方向,并且它能够记录和绘制传入和传出数据。
应用
可以帮助其他宇航员执行各种任务
可以在人类无法承受的危险条件下操作。
可以以极高的精度处理操作。
可用于维修空间站。
还可以被送到遥远的行星,这些行星的旅程需要数年才能完成。

156 次浏览
