
 数据结构
数据结构 网络
网络 关系数据库管理系统 (RDBMS)
关系数据库管理系统 (RDBMS) 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C语言编程
C语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
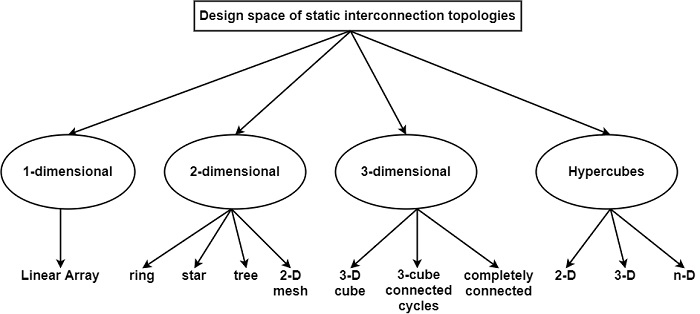
PHP静态互连拓扑的设计空间是什么?
在静态网络中,输入和输出节点之间的连接是固定的,无法修改。静态互连网络无法重新配置。这种网络的例子包括线性阵列、环形、弦形环、树形、星形、胖树形、网格、环游、 systolic arrays 和超立方体。静态互连拓扑的设计空间如图所示。
线性阵列
这是最基本的互连设计。在这个设计中,处理器连接在一个线性的一维阵列中。第一个和最后一个处理器连接到一个相邻的处理器,中间的处理组件连接到两个相邻的处理器。它是一个一维互连网络。

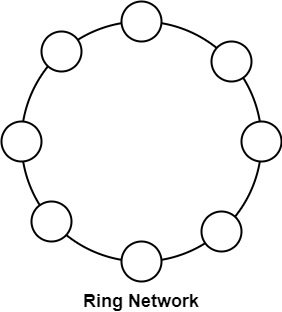
环形
这是一个简单的线性阵列,其中端节点连接在一起。它类似于具有环绕连接的网格。环形中的数据传输通常是单向的。
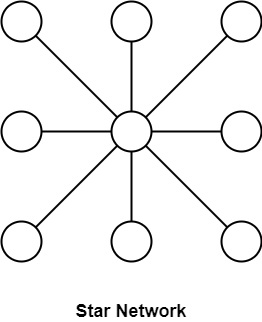
星形
星形连接是另一种简单且低成本 (C=N-1) 的拓扑结构,如图所示,它与线性阵列具有相同的较差的二分宽度 (B=1) 和弧连接性 (A=1) 参数,但直径得到了显著改善 (D=2)。
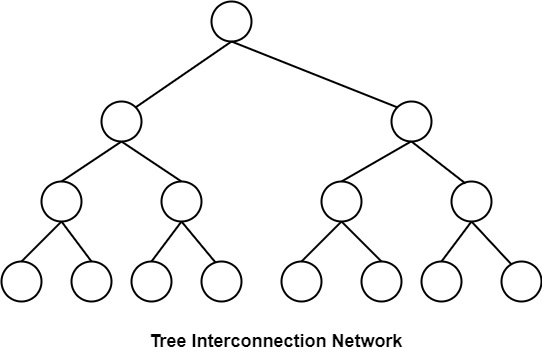
树形互连网络
在树形互连网络中,处理器按完整的二叉树方案组织。
胖树形
它是树形网络的改进版本。在这个网络中,边缘的带宽朝着根部提高。这是对普通树木的更合理的模拟,其中树枝向根部加深。
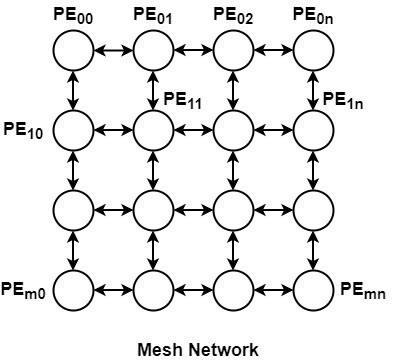
二维网格
这是一个二维网络。在这个网络中,所有处理组件都组织在一个二维网格中。第 i 行第 j 列的处理器用 **PEi,j** 表示。
角上的处理器可以连接到两个最近的邻居,即 **PE0,0** 可以连接到 **PE0,1** 和 **PE1,0**。边界上的处理器可以连接到 3 个相邻的处理单元,即 **PE0,1** 可以与 **PE0,0、PE0,2** 和 **PE1,1** 交互,内部的处理器可以连接到 4 个相邻的处理器,即 **PE1,1** 可以连接到 **PE0,1、PE1,0、PE1,2** 和 **PE2,1**。
三维立方体
这是一个三维互连网络。在这个网络中,PE 按立方体结构组织。
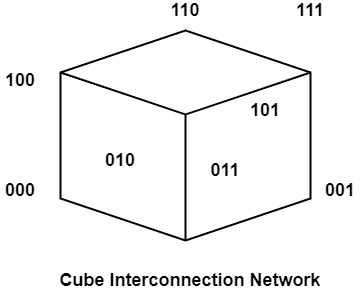
超立方体
超立方体互连网络是立方体网络的扩展。对于 n ≥ 3,超立方体互连网络可以递归地表示如下:
对于 n = 3,它是立方体网络,其中节点被赋予 0、1…7 的二进制编号。换句话说,其中一个节点被赋予标签 000,另一个被赋予标签 001……最后一个节点是 111。
因此,如果任何两个节点的标签只在一个位置不同,则任何节点都可以与任何其他节点连接,例如,标签为 101 的节点可以直接连接到 001、000 和 111。
完全连接网络
从网络直径 (D=1) 的角度来看,这种拓扑结构是理想的,因为任何两个节点都是直接连接的。成本 (C=N(N-1)/2) 和节点度 (d=N-1) 参数在构建基于这种拓扑结构的大规模并行计算机时是难以承受的。

浏览量 1K+
