
 数据结构
数据结构 网络
网络 关系数据库管理系统 (RDBMS)
关系数据库管理系统 (RDBMS) 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C语言编程
C语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP步进电机的正反转
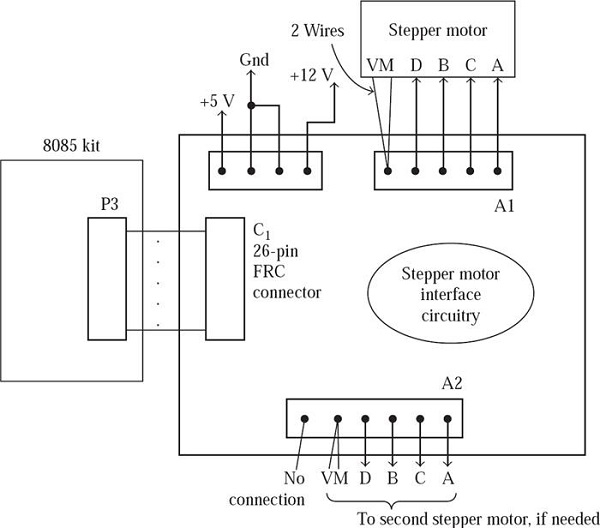
让我们考虑ALS-NIFC-01,这是一个步进电机接口。它使用26芯扁平电缆连接到ALS套件。它将用于连接两个步进电机。在当前实验中,我们只使用一个步进电机。该电机的步进尺寸为1.8°。步进电机的工作电源为+12V。接口提供+5V(白线)、GND(黑线)和+12V(红线)电源。请注意,接口不使用-12V电源。我们必须确保+12V电源具有足够的电流额定值来驱动步进电机。通过使用提供的电源,在步进电机接口中可以确保这一点。
使用五路Powermate连接器,将步进电机连接到接口。步进电机是两相六线电机。六根线用于D、B、C、A输入和VM连接(两根线)。五路Powermate连接器用于连接目的。确保红线连接到接口上的A1。为了向一个步进电机提供DBCA输入,使用PC3-0,而对于另一个电机,PC7-0提供DBCA输入,如图(a)所示。因此,在使用步进电机接口时,应将8255端口C配置为输出端口。接口的物理布局如图(b)所示。
可以使用“单相导通”方案实现四步序列,如下所示。在这种情况下,步进尺寸将为1.8°。
D B C A
1 0 0 0 = 8
0 1 0 0 = 4
0 0 1 0 = 2
0 0 0 1 = 1
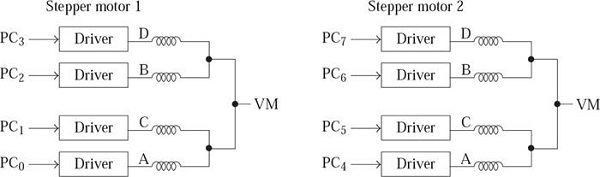
我们发送给步进电机接口的四步序列是88H、44H、22H和11H,而不是08H、04H、02H、01H,以便步进电机可以连接到接口板上提供的两个连接器中的任何一个。
如果序列反转,旋转也会反转。
让我们考虑一下这个领域中的一个问题解决方案。问题陈述如下:此处显示的程序使步进电机旋转100步,每步1.8度,从而产生半旋转。然后,它以相反的方向旋转半圈。这个序列无限重复。要停止操作,我们必须复位微处理器套件。
以下是用于正反向旋转的8085汇编语言程序。
程序
; FILE NAME STEP_MOTOR.ASM ORG C100H N DB 100 ; 100 steps of 1.8° = 0.5 Revolution ORG C000H PA EQU D8H PB EQU D9H PC EQU DAH CTRL EQU DBH DELAY EQU 04BEH MVI A, 80H OUT CTRL ; Configure 8255 Ports as O/P in Mode 0 BEGIN: LDA N MOV B, A MOV C, A ; Step Count Value in B and C Registers ; The next 7 instructions are used for Rotating by 100 Steps in One Direction MVI A, 88H; LOOP1:OUT PC LXI D, FFFFH CALL DELAY ; Generate Delay of 0.5 Secs. RRC DCR B JNZ LOOP1 ; The next 7 instructions are used for Rotating by 100 Steps in Opposite Direction MVI A, 88H LOOP2: OUT PC LXI D, FFFFH CALL DELAY ; Generate delay of 0.5 Secs. RLC DCR C JNZ LOOP2 JMP BEGIN1

浏览量:2K+
