
 数据结构
数据结构 网络
网络 关系数据库管理系统 (RDBMS)
关系数据库管理系统 (RDBMS) 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C语言编程
C语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP什么是单叠变磁阻步进电机?
单叠变磁阻 (VR) 步进电机的工作原理基于磁通线占据低磁阻路径的特性。因此,在变磁阻步进电机中,定子和转子会对齐,使得磁阻最小。
单叠变磁阻步进电机的构造
单叠变磁阻步进电机由凸极定子组成。定子在定子极上设置有集中绕组。定子相数取决于定子线圈的连接方式。单叠变磁阻步进电机的转子是由铁磁材料制成的开槽结构,并且不带绕组。
在单叠变磁阻步进电机中,定子和转子均由具有很高磁导率的高质量磁性材料制成,因此电机所需的励磁电流非常小。
单叠变磁阻步进电机的运行
当定子相位通过半导体开关从直流电源按适当的顺序激励时,电机中会产生磁场。铁磁性转子占据在定子磁场路径中呈现最小磁阻的位置。因此,转子轴线将自身与定子磁场轴线对齐。
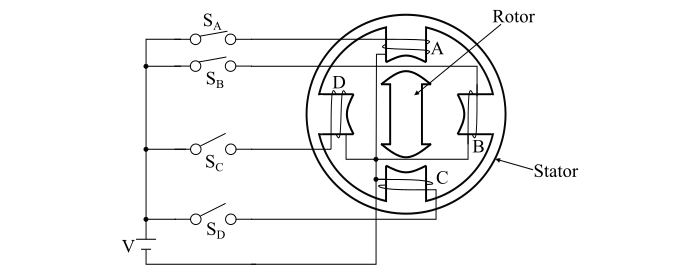
假设一个单叠变磁阻步进电机具有 4 相,4/2 极(即定子 4 极,转子 2 极)。电机的 4 相 A、B、C、D 分别通过半导体开关 SA、SB、SC 和 SD 连接到直流电源。电机的定子相绕组按 A、B、C、D、A 的顺序激励。
当相位绕组 A 激励时,转子与相位 A 的轴线对齐。转子将保持在此位置稳定,并且在相位 A 断电之前不会移动。
接下来,激励相位 B 并断电相位 A。转子将顺时针方向旋转 90° 以与现在位于相位 B 轴线上的定子磁场对齐。
现在,激励相位 C 并断电相位 B,转子将顺时针方向进一步旋转 90°。在此位置,转子与定子磁场对齐,该磁场现在位于相位 C 的轴线上。因此,当相位按 A、B、C、D、A 的顺序激励时,转子在每次转换时顺时针方向旋转 90°。转子通过四个步骤完成一次旋转。通过反转绕组的开关顺序可以反转转子的旋转方向,即对于逆时针方向的旋转,相位激励的顺序将是 A、D、C、B、A。
从以上讨论可以看出,单叠变磁阻步进电机的转子旋转方向仅取决于相位的开关顺序,而与通过相位的电流方向无关。
任何变磁阻步进电机的步进角大小由下式给出:
$$\mathrm{步进角,\:α =\frac{360°}{𝑚_{𝑠}\:𝑁_{𝑟}}}$$
其中:
ms 是定子相数
Nr 是转子极数。
如果Ns 是定子极数,则变磁阻步进电机的步进角也可以表示为:
$$\mathrm{步进角,\:α =\frac{(𝑁_{𝑠} − 𝑁_{𝑟} ) \times 360°}{𝑁_{𝑠}\:𝑁_{𝑟}}}$$
通过按 A、A+B、B、B+C、C、C+D、D、D+A、A 的顺序激励相位,可以将变磁阻步进电机的步进角从 90° 降低到 45°。这里 (A+B) 表示相位 A 和 B 一起激励,因此产生的定子磁场将在携带相位绕组 A 和 B 的磁极之间,即产生的磁场轴线与磁极 A 的轴线顺时针方向成 45° 角。
因此,当激励相位 A 时,转子与相位 A 的轴线对齐。当相位 A 和 B 一起激励时,转子顺时针方向移动 45°。因此,这种从一个相位到另一个相位逐步转移激励的方法称为微步。**微步**用于实现更小的步进。为了获得更小的步进角值,使用更多数量的定子磁极和转子齿。

3K+ 次浏览
