
 数据结构
数据结构 网络
网络 关系数据库管理系统
关系数据库管理系统 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 语言编程
C 语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP什么是混合步进电机?
混合步进电机结合了可变电阻和永磁步进电机的特点。在混合步进电机中,转子中间设有一个轴向永磁体。永磁体被轴向磁化以产生一对极性标记为 N 和 S 的磁极,如图 1 所示。
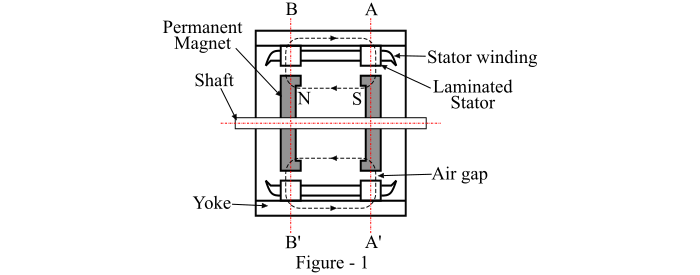
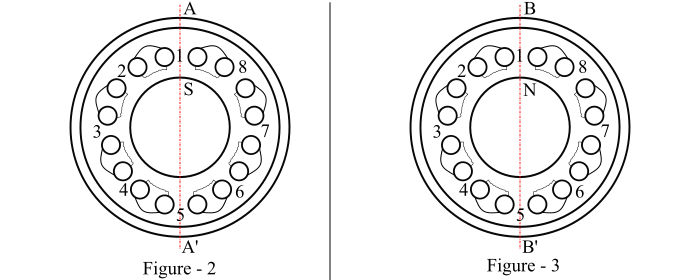
在轴向磁体的两端安装端盖。端盖具有相同数量的齿,这些齿被轴向磁体的相应极性磁化。转子两个端盖的横截面如图 2 和图 3 所示。
假设定子有 8 个磁极,每个磁极有一个线圈和 5 个齿。因此,定子上共有 40 个磁极。此外,转子的每个端盖都有 50 个齿。因此,步进电机的步进角由下式给出:
$$\mathrm{步进角 =\frac{𝑁_{𝑠} − 𝑁_{r}}{𝑁_{𝑠}𝑁_{𝑟}} \times 360°}$$
其中,NS 是定子磁极数,Nr 是转子磁极数。
$$\mathrm{∴ 步进角 =\frac{50 − 40}{50 \times 40}\times 360°= 1.8°}$$
上图显示了一个步进角为 1.8° 的混合步进电机。在图 2 中,可以看出转子齿与定子齿完全对齐。但是,从图 3 可以看出,转子齿与定子槽对齐。这可以通过说明两个端盖的齿彼此错开半个齿距来描述。永磁体被轴向磁化,因此左端盖上的所有齿都获得南极性,而右端盖上的所有齿都获得北极性。
磁极 1、3、5 和 7 上的线圈串联形成 A 相。类似地,磁极 2、4、6 和 8 上的线圈串联形成 B 相。当 A 相通以正电流时,定子磁极 1 和 5 成为南极,定子磁极 3 和 7 成为北极。因此,具有北极性的转子齿与定子磁极 1 和 5 对齐,而具有南极性的转子齿与定子磁极 3 和 7 对齐。现在,当 A 相断电并通过正电流使 B 相通电时,转子将逆时针方向旋转一个完整的 1.8° 步进。
接下来,当 A 相通以负电流时,转子将沿相同方向(逆时针)进一步移动 1.8° 角。为了使转子进一步旋转 1.8°,需要通过负电流使 B 相通电。因此,为了使转子逆时针方向以 1.8° 的步进旋转,各相需要按 +A、+B、-A、-B、+B、+A……的相序激励。同样,为了使转子顺时针方向旋转,相序应为 +A、-B、+B、+A……。
现在,如果从混合步进电机中去除激励,则转子将继续保持在去除激励之前的相同位置。这是因为永磁体产生的保持力矩或约束力矩阻止了转子向任何一个方向移动。
混合步进电机的优点
混合步进电机的优点如下:
与可变电阻步进电机相比,混合步进电机的步长较小。
混合步进电机具有比 VR 步进电机更大的单位体积扭矩。
混合步进电机在绕组断电时提供保持力矩。
混合步进电机较少发生共振。
混合步进电机在较低速度和较低步进速率下具有较高的效率。
混合步进电机的缺点
混合步进电机存在以下缺点:
混合步进电机的性能受磁强变化的影响。
由于转子磁体的存在,混合步进电机具有较高的惯性和重量。
混合步进电机比可变电阻步进电机更昂贵。

1K+ 浏览量
