卫星通信 - 快速指南
卫星通信 - 介绍
一般来说,**卫星**是指在太空中围绕较大天体旋转的较小天体。例如,月球是地球的天然卫星。
我们知道,**通信**是指通过任何媒介或渠道在两个或多个实体之间交换(共享)信息。换句话说,它就是发送、接收和处理信息。
如果通信是通过卫星在任意两个地球站之间进行的,则称为**卫星通信**。在这种通信中,电磁波用作载波信号。这些信号承载诸如语音、音频、视频或任何其他数据在陆地和太空之间以及反向传输的信息。
苏联于 1957 年发射了世界上第一颗人造卫星,名为斯普特尼克 1 号。近 18 年后,印度也于 1975 年发射了名为阿利亚巴塔的人造卫星。
卫星通信的必要性
以下两种传播方式之前用于在一定距离内进行通信。
**地波传播** - 地波传播适用于高达 30MHz 的频率。这种通信方法利用了地球的对流层条件。
**天波传播** - 这种通信类型的适用带宽大致在 30-40 MHz 之间,它利用了地球的电离层特性。
在地波传播和天波传播中,最大跳跃或站点距离仅限于 1500 公里。卫星通信克服了这一限制。在这种方法中,卫星提供**远距离通信**,远远超出了视线范围。
由于卫星位于地球上方一定高度,因此通过卫星可以轻松地在任意两个地球站之间进行通信。因此,它克服了由于地球曲率导致的两个地球站之间通信的限制。
卫星的工作原理
**卫星**是沿特定路径绕另一天体运行的天体。通信卫星只不过是太空中的微波中继站。它有助于电信、无线电和电视以及互联网应用。
**中继器**是一种电路,它会增强接收到的信号的强度,然后将其传输。但是,此中继器充当**转发器**。这意味着它会将接收到的信号的频带更改为另一个频带。
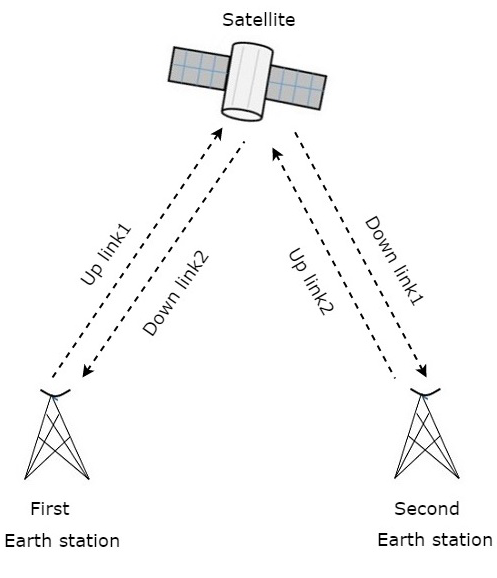
将信号发送到太空的频率称为**上行链路频率**。类似地,转发器发送信号的频率称为**下行链路频率**。下图清楚地说明了这一概念。
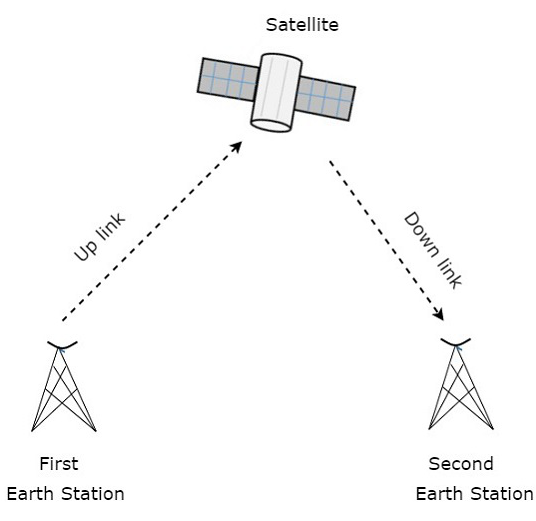
从第一个地球站到卫星通过信道的信号传输称为**上行链路**。类似地,从卫星到第二个地球站通过信道的信号传输称为**下行链路**。
**上行链路频率**是第一个地球站与卫星通信的频率。卫星转发器将此信号转换为另一个频率,并将其发送到第二个地球站。此频率称为**下行链路频率**。同样,第二个地球站也可以与第一个地球站通信。
卫星通信过程始于一个地球站。在这里,安装旨在发送和接收来自绕地球运行轨道上的卫星的信号。地球站以高功率、高频(GHz 范围)信号的形式将信息发送到卫星。
卫星接收并重新传输信号回地球,在那里它们被卫星覆盖区域内的其他地球站接收。卫星的**足迹**是接收来自卫星的有用强度信号的区域。
卫星通信的优缺点
在本节中,让我们看一下卫星通信的优点和缺点。
以下是使用卫星通信的**优点**
覆盖面积大于地面系统
可以覆盖地球的每一个角落
传输成本与覆盖面积无关
更大的带宽和广播可能性
以下是使用卫星通信的**缺点**:
将卫星发射到轨道是一个昂贵的过程。
卫星系统的传播延迟大于传统地面系统。
如果卫星系统出现任何问题,难以提供维修活动。
自由空间损耗更大
可能会出现频率拥塞。
卫星通信的应用
卫星通信在我们的日常生活中发挥着至关重要的作用。以下是卫星通信的应用:
广播和语音通信
电视广播,如直接对家 (DTH)
互联网应用,如提供用于数据传输的互联网连接、GPS 应用、互联网冲浪等。
军事应用和导航
遥感应用
天气状况监测和预报
卫星通信 - 轨道力学
我们知道,卫星绕地球运行的路径称为**轨道**。此路径可以用数学符号表示。轨道力学是对存在于轨道中的卫星运动的研究。因此,通过轨道运动的知识,我们可以很容易地理解空间操作。
轨道要素
轨道要素是有助于描述卫星轨道运动的参数。以下是**轨道要素**。
- 半长轴
- 偏心率
- 平均近点角
- 近地点幅角
- 倾角
- 升交点赤经
以上六个轨道要素定义了地球卫星的轨道。因此,可以根据轨道要素的值轻松地区分一颗卫星与其他卫星。
半长轴
**半长轴 (a)** 的长度定义了卫星轨道的尺寸。它是长轴的一半。它从中心穿过焦点到椭圆的边缘。因此,它是轨道在轨道两个最远点处的半径。
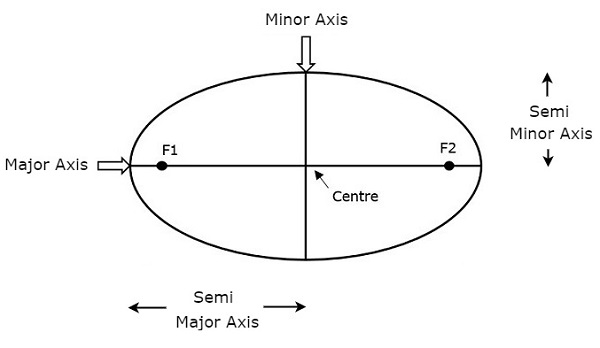
上图中表示了半长轴和半短轴。**半长轴 (a)** 的长度不仅决定了卫星轨道的尺寸,还决定了旋转周期。
如果将圆形轨道视为一个特例,则半长轴的长度将等于该圆形轨道的**半径**。
偏心率
**偏心率 (e)** 的值确定了卫星轨道的形状。此参数表示轨道形状与完美圆形的偏差。
如果椭圆轨道的半长轴和半短轴的长度分别为 a 和 b,则**偏心率 (e)** 的数学表达式为
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
圆形轨道的偏心率值为**零**,因为 a 和 b 相等。而椭圆轨道的偏心率值在零和一之间。
下图显示了不同偏心率 (e) 值的各种卫星轨道
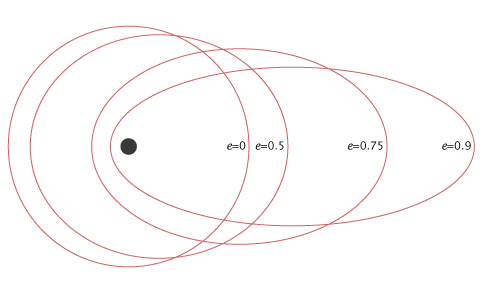
在上图中,对应于偏心率 (e) 值为零的卫星轨道是圆形轨道。其余三个卫星轨道是椭圆形的,分别对应于偏心率 (e) 值 0.5、0.75 和 0.9。
平均近点角
对于卫星,最靠近地球的点称为近地点。**平均近点角 (M)** 给出了相对于近地点的卫星角位置的平均值。
如果轨道是圆形的,则平均近点角给出卫星在轨道中的角位置。但是,如果轨道是椭圆形的,则计算精确位置非常困难。此时,平均近点角用作中间步骤。
近地点幅角
卫星轨道在赤道平面处有两个交点。第一个点称为**降交点**,卫星在此处从北半球过渡到南半球。第二个点称为**升交点**,卫星在此处从南半球过渡到北半球。
**近地点幅角 (ω)** 是升交点和近地点之间的角度。如果近地点和升交点都存在于同一点,则近地点幅角将为零度
近地点幅角在地球中心的轨道平面内以卫星运动的方向测量。
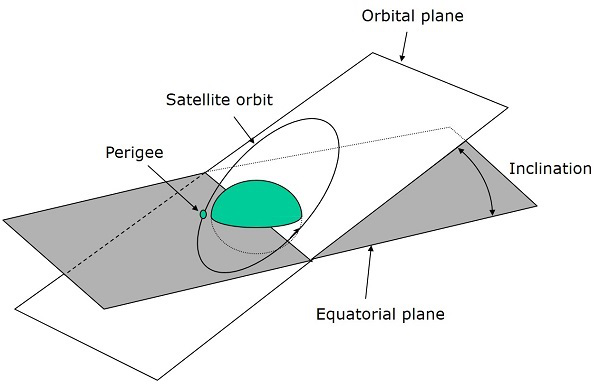
倾角
轨道平面和地球赤道平面之间的角度称为**倾角 (i)**。它在升交点处测量,方向为东到北。因此,倾角通过将地球赤道作为参考来定义轨道的方向。
根据倾角,轨道有四种类型。
**赤道轨道** - 倾角为零度或 180 度。
**极轨道** - 倾角为 90 度。
**顺行轨道** - 倾角在零到 90 度之间。
**逆行轨道** - 倾角在 90 到 180 度之间。
升交点赤经
我们知道,**升交点**是卫星在从南半球到北半球的过程中穿过赤道平面的点。
升交点赤经** (Ω)** 是白羊座线和升交点在赤道平面内向东方向之间的角度。白羊座也称为春分点。
卫星的**地面轨迹**是地球表面上位于其轨道正下方的路径。卫星的地面轨迹可以采用多种不同的形式,具体取决于轨道要素的值。
轨道方程
在本节中,让我们讨论与轨道运动相关的方程。
作用在卫星上的力
当卫星绕地球运行时,由于地球的万有引力,它会受到来自地球的拉力。此力称为**向心力** (F1),因为此力使卫星倾向于向其移动。
在数学上,由于地球作用在卫星上的**向心力** (F1) 可以写成
$$F_{1} = \frac{GMm}{R^2} $$
其中,
**G** 是万有引力常数,等于 6.673 x 10-11 N∙m2/kg2。
**M** 是地球的质量,等于 5.98 x 1024 千克。
**m** 是卫星的质量。
**R** 是卫星到地球中心的距离。
当卫星绕地球运行时,由于太阳和月球的引力,它会受到来自太阳和月球的拉力。这种力被称为**离心力**(F2),因为这种力会使卫星远离地球。
在数学上,作用在卫星上的**离心力**(F2)可以写成
$$F_{2} = \frac{mv^2}{R} $$
其中,**v**是卫星的轨道速度。
轨道速度
卫星的轨道速度是指卫星绕地球运行的速度。当向心力和离心力**平衡**时,卫星不会偏离其轨道,并以一定的速度在该轨道上运行。
因此,**使**向心力(F1)和离心力(F2)相等。
$$\frac{GMm}{R^2} = \frac{mv^2}{R}$$
$$= > \frac{GM}{R} = v^2$$
$$= > v = \sqrt{\frac{GM}{R}}$$
因此,卫星的**轨道速度**为
$$v = \sqrt{\frac{GM}{R}}$$
其中,
G是万有引力常数,其值为6.673 x 10-11 N∙m2/kg2。
**M** 是地球的质量,等于 5.98 x 1024 千克。
**R** 是卫星到地球中心的距离。
因此,轨道速度主要**取决于**卫星到地球中心距离(R),因为G和M是常数。
卫星通信 - 开普勒定律
我们知道卫星绕地球运行,这类似于地球绕太阳运行。因此,应用于地球及其绕太阳运动的原理也适用于卫星及其绕地球的运动。
许多科学家从早期就开始提出各种理论。但是,只有**约翰内斯·开普勒**(1571-1630)是最被认可的科学家之一,他描述了卫星绕地球运行的原理。
开普勒提出了三条定律,改变了整个卫星通信理论和观测。这些定律被普遍称为**开普勒定律**。这些定律有助于可视化太空中的运动。
开普勒第一定律
开普勒第一定律指出,卫星绕其中心天体(地球)运行的路径将是**椭圆**。该椭圆有两个焦点F1和F2,如下图所示。地球的质量中心将始终位于椭圆的两个焦点之一。
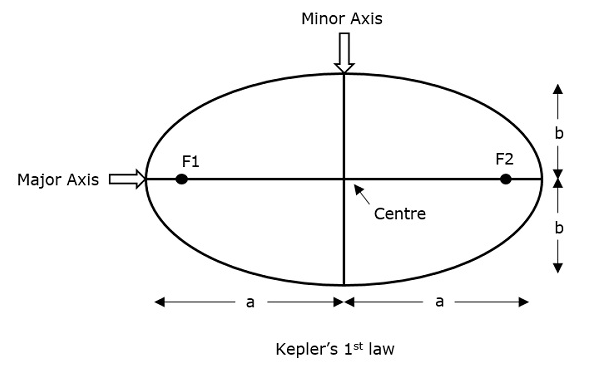
如果考虑从物体中心到其椭圆路径上一点的距离,则椭圆离中心最远点称为**远地点**,椭圆离中心最近点称为**近地点**。
该系统的**偏心率“e”**可以写成−
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
其中,**a**和**b**分别是椭圆的长半轴和短半轴的长度。
对于**椭圆路径**,偏心率(e)的值始终介于0和1之间,即$0$ < $e$ < $1$,因为a大于b。假设,如果偏心率(e)的值为零,则路径将不再是椭圆形,而是会变成圆形。
开普勒第二定律
开普勒第二定律指出,在相等的时间间隔内,卫星相对于地球质量中心的**面积**相同。通过查看下图可以理解这一点。
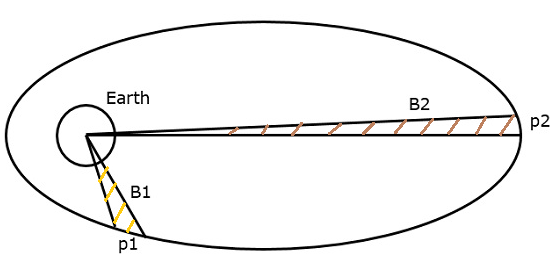
假设,卫星在相同的时间间隔内覆盖了p1和p2的距离。那么,卫星在这两个时刻覆盖的面积B1和B2相等。
开普勒第三定律
开普勒第三定律指出,椭圆轨道的周期时间的平方与其长半轴长度的立方成正比。**在数学上**,可以写成如下−
$$T^2\:\alpha\:a^3$$
$$=> T^2=\left(\frac{4\pi ^2}{\mu }\right) a^3$$
其中,$\frac{4\pi^2}{\mu}$是比例常数。
$\mu$是开普勒常数,其值为3.986005 x 1014m3 /sec2
$$1 = \left(\frac{2\pi}{T}\right)^2\left(\frac{a^2}{\mu}\right)$$
$$1 = n^2\left(\frac{a^3}{\mu}\right)$$
$$=> a^3 = \frac{\mu}{n^2}$$
其中,**‘n’**是卫星的平均运动,单位为弧度/秒。
注意 − 当卫星绕地球运行时,它会受到地球的引力,即万有引力。类似地,它还会受到来自太阳和月球的另一种拉力。因此,卫星必须平衡这两种力才能保持在轨道上。
地球轨道卫星
卫星在进入太空后应被正确放置在其对应的轨道上。它以特定的方式运行,并为科学、军事或商业目的服务。分配给相对于地球的卫星的轨道称为**地球轨道**。这些轨道上的卫星称为**地球轨道卫星**。
我们应该根据需要正确选择卫星的轨道。例如,如果卫星放置在**较低轨道**上,则它绕地球运行的时间较短,并且机载摄像机的分辨率会更好。类似地,如果卫星放置在**较高轨道**上,则它绕地球运行的时间较长,并且一次覆盖更多的地球表面。
以下是三种重要的**地球轨道卫星类型**−
- 地球同步轨道卫星
- 中地球轨道卫星
- 低地球轨道卫星
现在,让我们逐一讨论每种类型的地球轨道卫星。
地球同步轨道卫星
地球同步轨道**(GEO)卫星**是指放置在地球上方**22,300**英里高度的卫星。该轨道与恒星日(即23小时56分钟)同步。该轨道可以具有倾角和偏心率。
它可能不是圆形的。该轨道可以倾斜于地球的两极。但是,从地球上观察时,它看起来是静止的。这些卫星用于卫星电视。
如果该地球同步轨道是圆形且位于赤道平面内,则称为**地球静止轨道**。这些卫星位于地球赤道上方35,900公里(与地球同步轨道相同),并且它们相对于地球的方向(西到东)不断旋转。
这些轨道上的卫星的角速度与地球的角速度相同。因此,这些卫星被认为相对于地球是**静止的**,因为它们与地球的自转同步。
地球静止轨道的**优点**是不需要跟踪天线才能找到卫星的位置。
地球静止轨道卫星用于天气预报、卫星电视、卫星广播和其他类型的全球通信。
下图显示了地球同步轨道和地球静止轨道之间的区别。旋转轴表示地球的运动。
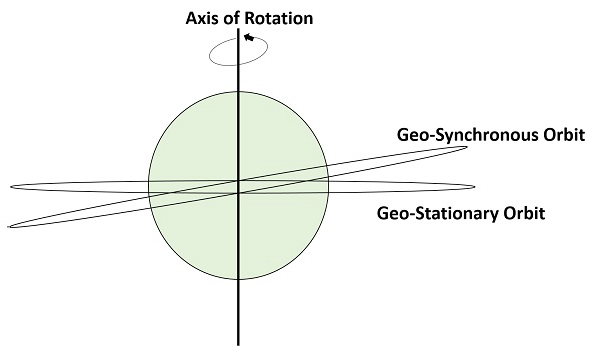
注意 − 每个地球静止轨道都是地球同步轨道。但是,反之则不一定成立。
中地球轨道卫星
中地球轨道**(MEO)**卫星将在距离地球表面约**8000英里**的地方运行。从MEO卫星发射的信号传播距离较短。因此,接收端的信号强度得到改善。这表明在接收端可以使用更小、更轻的接收终端。
**传输延迟**可以定义为信号传播到卫星并返回到接收站所需的时间。在这种情况下,传输延迟较小。因为,信号到MEO卫星和从MEO卫星返回的传播距离较短。
对于**实时通信**,传输延迟越短,通信系统越好。例如,如果GEO卫星往返一次需要0.25秒,则MEO卫星完成相同行程需要不到0.1秒。MEO在2 GHz及以上频率范围内工作。
这些卫星用于高速电话信号。为了覆盖整个地球,需要10个或更多MEO卫星。
低地球轨道卫星
低地球轨道**(LEO)**卫星主要分为三类。它们是小LEO、大LEO和巨型LEO。LEO将在距离地球表面**500到1000英里**的地方运行。这些卫星用于卫星电话和GPS。
这种相对较短的距离将传输延迟缩短至仅0.05秒。这进一步减少了对灵敏且笨重的接收设备的需求。为了覆盖整个地球,需要20个或更多LEO卫星。
小LEO将在800 MHz(0.8 GHz)范围内工作。大LEO将在2 GHz或以上范围内工作,而巨型LEO在20-30 GHz范围内工作。
与**巨型LEO**相关的较高频率转化为更大的信息承载能力,并产生实时、低延迟视频传输方案的能力。
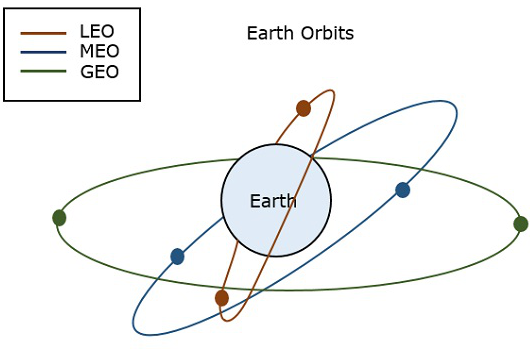
下图显示了LEO、MEO和GEO的路径
轨道槽位
这里,可能会出现一个问题,即在200多颗地球同步轨道卫星中,我们如何防止它们相互碰撞或试图使用太空中的相同位置?
为了解决这个问题,国际电信联盟**(ITU)**等国际监管机构和美国联邦通信委员会**(FCC)**等国家政府组织指定了地球同步轨道上的位置,通信卫星可以位于这些位置。
这些位置以经度度数指定,称为**轨道槽位**。由于对轨道槽位的巨大需求,FCC和ITU逐渐将所需的间距缩小到仅2度,用于C波段和Ku波段卫星。
仰角和轨道摄动
如果地球站位于卫星正下方,则将接收最大信号电平。否则,它将不会接收最大信号电平,并且随着地球站的纬度和经度差异的增加,该信号电平会降低。
因此,根据需要,我们可以将卫星放置在特定的轨道上。现在,让我们讨论一下仰角。
仰角
地球站天线的以下两个角度组合在一起称为**仰角**。
- 方位角
- 仰角
通常,这些角度的值对于非地球静止轨道会发生变化。而对于地球静止轨道,这些角度的值不会改变。因为,位于地球静止轨道上的卫星相对于地球看起来是静止的。
这两个角度有助于从地球站天线直接指向卫星。因此,地球站天线的**最大增益**可以指向卫星。
我们可以使用地球站的经度和纬度以及卫星轨道的方位来**计算**地球静止轨道的仰角。
方位角
地球站、卫星和地球中心所在的平面与当地水平面之间的夹角称为**方位角**。
方位角($\alpha$)的**公式**为
$$\alpha\: = 180^0 + Tan^{-1}\left(\frac{Tan G}{TanL}\right)$$
其中,
L是地球站天线的纬度。
G是卫星轨道位置与地球站天线位置之间的差异。
下图显示了方位角。
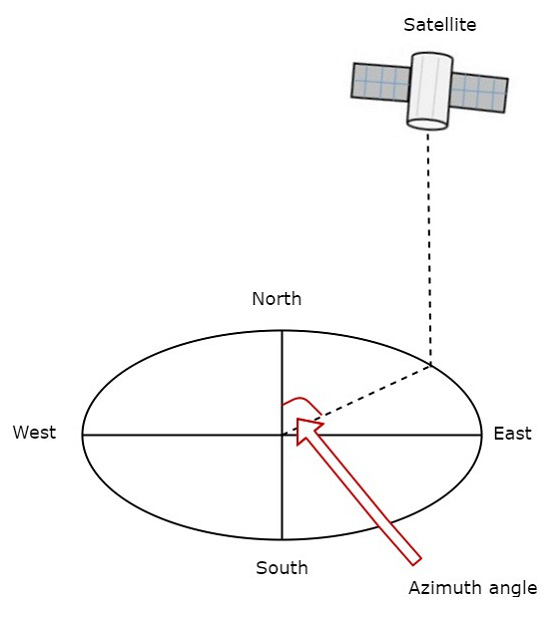
测量地球站天线到北极的**水平角**,如图所示。它表示方位角。它用于水平跟踪卫星。
仰角
指向卫星的直线与垂直平面之间的夹角称为仰角。垂直平面就是垂直于水平平面的平面。
仰角($\beta$)的**公式**为
$$\beta = Tan^{-1}\left(\frac{cosG.cosL-0.15}{\sqrt{1-cos^2G.cos^2L}}\right)$$
我们可以使用上述公式计算仰角。下图说明了仰角。
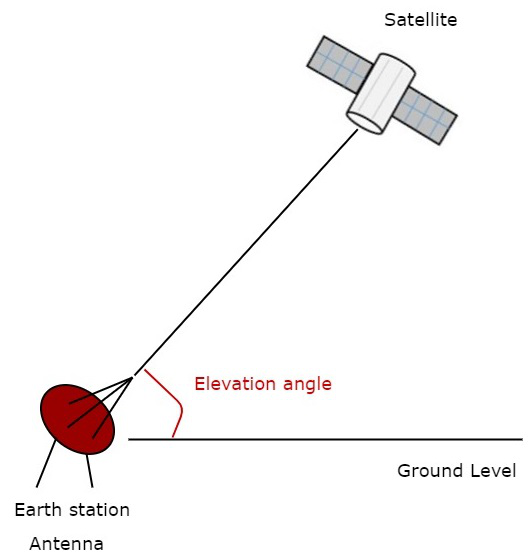
如图所示,测量地球站天线从地面到卫星的垂直角。它表示仰角。
轨道摄动
以下是由于引力和非引力或参数引起的轨道摄动。
由于质量分布不均匀,地球周围存在不规则的引力。地球的磁场也会导致轨道摄动。
主要的外部摄动来自太阳和月亮。当卫星靠近这些外部天体时,会受到更强的引力。
低轨道卫星会受到与原子和离子碰撞产生的摩擦影响。
太阳辐射压会影响使用大型太阳能电池阵列的大型地球同步轨道卫星。
天线发射的射频辐射产生的自生扭矩和压力。
大多数卫星使用推进子系统来维持适当的自旋轴方向并控制卫星相对于摄动力的高度。
卫星通信 - 发射
卫星在其大部分生命周期中都停留在太空中。我们知道太空中存在失重环境。这就是为什么卫星在太空中不需要额外的坚固框架。但是,在发射过程中需要这些框架。因为在这个过程中,卫星会剧烈震动,直到卫星被放置在合适的轨道上。
卫星的设计应该与一个或多个运载火箭兼容,以便将卫星送入轨道。
根据开普勒第二定律,我们知道,对于更高的远地点高度,公转周期会更长。地球同步转移轨道的周期大约为16小时。如果近地点增加到地球同步轨道高度(约36,000公里),那么公转周期将增加到24小时。
卫星发射
将卫星放置在适当轨道上的过程称为发射过程。在此过程中,我们可以从地球站控制卫星的操作。主要有四个阶段可以发射卫星。
第一阶段 - 发射运载火箭的第一阶段包含火箭和燃料,用于将卫星连同运载火箭从地面提升起来。
第二阶段 - 发射运载火箭的第二阶段包含较小的火箭。这些火箭在第一阶段完成后点火。它们有自己的燃料箱,以便将卫星送入太空。
第三阶段 - 发射运载火箭的第三(上)阶段连接到卫星整流罩。该整流罩是一个金属屏蔽罩,包含卫星并保护卫星。
第四阶段 - 当卫星到达地球大气层外时,卫星与运载火箭的上级分离。然后,卫星将进入“转移轨道”。该轨道将卫星送入更高的太空。
当卫星到达轨道所需高度时,其子系统(如太阳能电池板和通信天线)会展开。然后,卫星在轨道上与其他卫星一起占据其位置。现在,卫星已准备好为公众提供服务。
卫星运载火箭
卫星运载火箭根据需要将卫星发射到特定的轨道。卫星运载火箭只不过是多级火箭。以下是两种类型的卫星运载火箭。
- expendable launch vehicles (消耗性运载火箭)
- Reusable Launch Vehicles (可重复使用运载火箭)
消耗性运载火箭
消耗性运载火箭 (ELV) 在将卫星送入太空后会被摧毁。下图显示了 ELV 的外观。

ELV 包含三个阶段。ELV 的第一和第二阶段将卫星提升到大约 50 英里和 100 英里。ELV 的第三阶段将卫星送入转移轨道。当卫星到达转移轨道时,ELV 的任务将完成,其备件将坠落到地球上。
可重复使用运载火箭
可重复使用运载火箭 (RLV) 可以多次用于发射卫星。通常,这种类型的运载火箭在将卫星送入太空后会返回地球。
下图显示了一枚可重复使用运载火箭。它也被称为航天飞机。

航天飞机的功能类似于 ELV 第一和第二阶段的功能。卫星连同航天飞机的第三阶段安装在货舱中。当航天飞机到达 150 至 200 英里的高度时,它会从货舱中弹出。
然后,航天飞机的第三阶段点火并将卫星送入转移轨道。之后,航天飞机将返回地球以供重复使用。
卫星通信 - 子系统
在卫星通信系统中,会发生各种操作。其中,主要操作包括轨道控制、卫星高度、其他子系统的监控和控制。
卫星通信主要由两个部分组成。它们是空间段和地面段。因此,相应地将有两类子系统,即空间段子系统和地面段子系统。下图说明了这一概念。
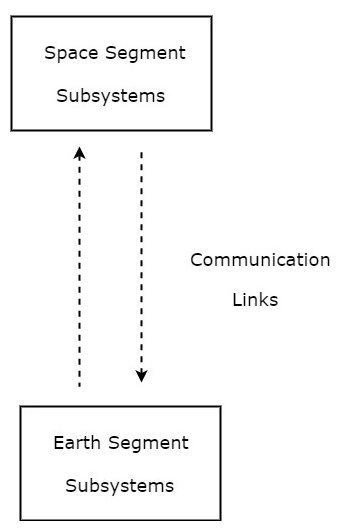
如图所示,通信通过通信链路在空间段子系统和地面段子系统之间进行。
空间段子系统
空间段中存在的子系统称为空间段子系统。以下是空间段子系统。
- AOC 子系统
- TTCM 子系统
- 电源和天线子系统
- 转发器
地球段子系统
地面段中存在的子系统能够访问卫星转发器,以便在用户之间提供通信。地球段也称为地面段。
地球段主要执行两个功能。它们是将信号传输到卫星和接收来自卫星的信号。地球站是地球段中主要存在的子系统。
我们将在后面的章节中讨论所有这些空间段和地面段子系统。
卫星通信 - AOC 子系统
我们知道,由于来自太阳、月球和其他行星的引力,卫星可能会偏离其轨道。由于卫星绕地球运行,这些力在 24 小时内周期性地变化。
高度和轨道控制(AOC) 子系统由火箭发动机组成,当卫星偏离各自轨道时,这些发动机能够将卫星送入正确的轨道。AOC 子系统有助于使窄波束类型的天线指向地球。
我们可以将此 AOC 子系统分为以下两部分。
- 高度控制子系统
- 轨道控制子系统
现在,让我们逐一讨论这两个子系统。
高度控制子系统
高度控制子系统负责卫星在其各自轨道上的方向。以下是使位于轨道上的卫星稳定的两种方法。
- 旋转卫星
- 三轴方法
旋转卫星
在这种方法中,卫星的主体围绕其自旋轴旋转。通常,它可以以 30 到 100 rpm 的速度旋转以产生一种陀螺类型的力。因此,自旋轴得到稳定,并且卫星将指向相同的方向。这种类型的卫星称为旋转卫星。
旋转卫星包含一个圆柱形鼓。该鼓覆盖有太阳能电池。电源系统和火箭位于此鼓中。
通信子系统放置在鼓的顶部。一个电动机驱动此通信系统。该电机的方向与卫星主体的旋转方向相反,以便天线指向地球。执行此类操作的卫星称为反旋。
在发射阶段,当操作小的径向气体喷射器时,卫星旋转。此后,反旋系统开始工作,以使 TTCM 子系统天线指向地球站。
三轴方法
在这种方法中,我们可以使用一个或多个动量轮来稳定卫星。这种方法称为三轴方法。这种方法的优点在于可以控制卫星在三个轴上的方向,并且无需旋转卫星的主体。
在这种方法中,考虑以下三个轴。
滚转轴被认为是卫星在轨道平面内移动的方向。
偏航轴被认为是朝向地球的方向。
俯仰轴被认为是垂直于轨道平面的方向。
这三个轴在下图中显示。
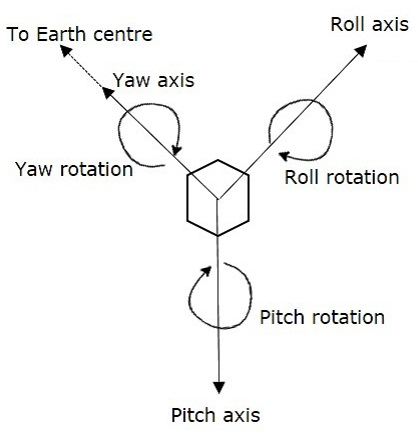
令 XR、YR 和 ZR 分别为滚转轴、偏航轴和俯仰轴。通过将卫星的位置视为参考来定义这三个轴。这三个轴定义了卫星的高度。
令 X、Y 和 Z 是另一组笛卡尔坐标轴。这组三个轴提供了关于卫星相对于参考轴的方向信息。如果卫星的高度发生变化,则各个轴之间的角度将发生变化。
在这种方法中,每个轴包含两个气体喷射器。它们将提供三个轴两个方向上的旋转。
当需要卫星在特定轴方向上的运动时,第一个气体喷射器将运行一段时间。
当卫星到达所需位置时,第二个气体喷射器将运行相同的时间。因此,第二个气体喷射器将停止卫星在该轴方向上的运动。
轨道控制子系统
轨道控制子系统有助于将卫星带到其正确的轨道上,无论何时卫星偏离其轨道。
地球站上存在的 TTCM 子系统监控卫星的位置。如果卫星轨道有任何变化,它会发送关于校正的信号到轨道控制子系统。然后,它将通过将卫星带到正确的轨道上来解决该问题。
这样,AOC 子系统在卫星在太空中整个生命周期中都负责卫星在正确轨道和正确高度上的位置。
卫星通信 - TTCM 子系统
遥测、跟踪、指令和监控(TTCM) 子系统存在于卫星和地球站中。通常,卫星通过传感器获取数据。因此,卫星中存在的遥测子系统将这些数据发送到地球站。因此,对于任何通信卫星来说,TTCM 子系统对于成功运行都非常必要。
在将卫星放置在适当轨道后,卫星运营商有责任控制卫星在其生命周期中的运行。这可以通过TTCM 子系统来实现。
我们可以将此 TTCM 子系统分为以下三部分。
- 遥测和监控子系统
- 跟踪子系统
- 指令子系统
遥测和监控子系统
“遥测”一词表示远距离测量。主要在“遥测”中进行以下操作。
生成与待测量成正比的电信号。
对电信号进行编码。
将此代码传输到远距离。
卫星中存在的遥测子系统主要执行两个功能 -
- 接收来自传感器的数据,以及
- 将该数据传输到地球站。
卫星有相当多的传感器来监控各种子系统的不同参数,例如压力、温度、状态等。通常,遥测数据以 FSK 或 PSK 形式传输。
遥测子系统是一个远程控制系统。它将卫星的监测数据发送到地面站。通常,**遥测信号**携带与卫星高度、环境和卫星相关的信息。
跟踪子系统
跟踪子系统用于了解卫星的位置及其当前轨道。卫星控制中心**(SCC)**借助遥测下行链路监测空间段子系统的运行和状态。并且,它使用命令上行链路控制这些子系统。
我们知道**跟踪子系统**也存在于地面站中。它主要关注卫星的距离和仰角。有多种技术用于跟踪卫星。**例如**,可以使用卫星上存在的速度和加速度传感器获得的数据来识别卫星轨道位置的变化。
地面站中存在的**跟踪子系统**在卫星从运载火箭末级释放后一直跟踪卫星。它执行诸如在初始轨道和转移轨道上定位卫星等功能。
指令子系统
命令子系统对于将卫星发射到轨道以及在轨道上运行是必要的。此子系统在这些值出现偏差时调整卫星的高度和轨道。它还控制通信子系统。此**命令子系统**负责根据从遥测和跟踪子系统获得的数据,打开/关闭卫星中存在的其他子系统。
通常,控制代码被转换为命令字。这些命令字用于以**TDM帧**的形式发送。最初,命令字的有效性在卫星中进行检查。在此之后,这些命令字可以发送回地面站。在这里,这些命令字再次被检查。
如果地面站也接收到相同的(正确的)命令字,则它向卫星发送执行指令。因此,它执行该命令。
从功能上讲,遥测子系统和命令子系统彼此相反。因为,第一个将卫星的信息传输到地面站,第二个接收来自地面站的命令信号。
电源和天线子系统
在本章中,让我们分别讨论一下**电源系统**(卫星的各个子系统从中获取电源)和**天线子系统**。
电源系统
我们知道,在轨卫星在其整个生命周期内都应持续运行。因此,卫星需要内部电源才能运行其内部的各种电子系统和通信有效载荷。
**电源系统**是一个至关重要的子系统,它提供卫星运行所需的电源。主要是在这些系统中使用太阳能电池(或电池板)和可充电电池。
太阳能电池
基本上,**太阳能电池**利用入射阳光产生电能(电流)。因此,太阳能电池主要用于为卫星的其他子系统提供电力。
我们知道单个太阳能电池产生的电能非常少。因此,为了产生更多的电能,可以使用以阵列形式存在的电池组。
太阳能电池阵列
卫星中使用了两种**类型的太阳能电池阵列**。它们是圆柱形太阳能电池阵列和矩形太阳能电池阵列或太阳帆。
**圆柱形太阳能电池阵列**用于旋转卫星。在任何给定时间,只有一部分圆柱形阵列会被阳光覆盖。因此,电能由部分太阳能电池阵列产生。这是这种类型的缺点。
**太阳帆**克服了圆柱形太阳能电池阵列的缺点。它可以产生更多的电力,因为太阳帆的所有太阳能电池都暴露在阳光下。
可充电电池
在日食期间,很难从阳光中获取电力。因此,在这种情况下,其他子系统从**可充电电池**获取电力。这些电池还在卫星发射期间为其他子系统供电。
通常,这些电池由于太阳能电池在阳光照射下产生的过量电流而充电。
天线子系统
卫星和地面站中都存在天线。现在,让我们讨论一下卫星天线。
卫星天线执行**两种类型的**功能。它们是接收来自地面站的信号以及根据需要将信号传输到一个或多个地面站。换句话说,卫星天线接收上行链路信号并传输下行链路信号。
我们知道卫星天线的长度与工作频率成反比。为了减少卫星天线的长度,必须提高工作频率。因此,卫星天线的工作频率在**GHz**数量级。
卫星天线
卫星中使用的天线称为卫星天线。主要有四**种类型的天线**。他们是
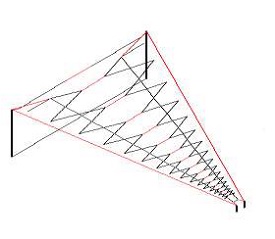
- 线天线
- 喇叭天线
- 阵列天线
- 反射天线
现在,让我们逐一讨论这些天线。
线天线
线天线是基本天线。**单极天线**和**偶极天线**属于此类。它们用于非常高的频率,以提供TTCM子系统的通信。
如果用作偶极子的总线的长度等于波长的一半(即,l = λ/2),则这种天线称为**半波偶极天线**。
**线天线**适用于覆盖其覆盖范围并在所有方向上提供信号强度。这意味着,线天线是全向天线。
喇叭天线
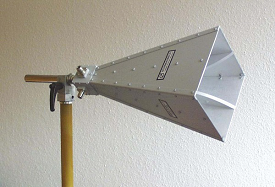
末端带有孔径的天线可以称为**孔径天线**。当传输线的边缘以开口终止时,会辐射能量。这个开口,也就是孔径,使它成为孔径天线。
**喇叭天线**是孔径天线的一个例子。它用于卫星中,以覆盖地球上更大的区域。
喇叭天线用于**微波**频率范围。相同的馈电喇叭可用于发射和接收信号。一种名为双工器的设备可以分离这两个信号。
阵列天线
当单个天线能够以特定方向辐射一定量的能量,从而获得更好的传输效果时,如果添加更多元件会怎样,以产生更有效的输出。正是这个想法导致了**阵列天线**或天线阵列的发明。阵列天线用于卫星中,以从单个孔径形成多个波束。

反射天线

反射天线适合产生在某个特定方向上具有更大信号强度的波束。这意味着,这些是高度定向的天线。因此,**抛物面反射器**提高了卫星通信系统中天线的增益。因此,它们用于电信和广播。
如果抛物面反射天线用于**发射**信号,则来自馈电的信号会从偶极子或喇叭天线发出,以将波聚焦到抛物线上。这意味着,波从焦点发出并撞击抛物面反射器。此波现在被反射为准直波前。
如果同一根天线用作**接收器**,则当电磁波撞击抛物线的形状时,波会被反射到馈电点。偶极子或喇叭天线充当其馈电处的接收天线,接收此信号,将其转换为电信号并将其转发到接收电路。
卫星通信 - 中继器
提供卫星发射和接收天线之间连接链路的子系统称为**中继器**。它是空间段子系统中最重要的子系统之一。
中继器在卫星中执行发射器和接收器(响应器)的功能。因此,“中继器”一词是通过组合两个单词的几个字母获得的,发射器**(Trans)**和响应器**(ponder)**。
中继器框图
中继器主要执行**两个功能**。它们是放大接收到的输入信号并转换其频率。通常,为上行链路和下行链路选择不同的频率值,以避免发射和接收信号之间的干扰。
中继器的**框图**如下所示。
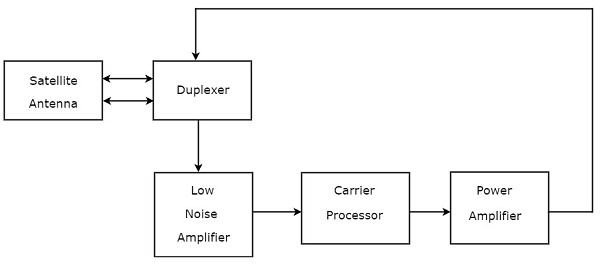
我们可以从框图本身轻松了解中继器的操作。每个模块的功能如下所示。
**双工器**是一个双向微波门。它接收来自卫星天线的上行链路信号并将下行链路信号传输到卫星天线。
**低噪声放大器**(LNA)放大微弱的接收信号。
**载波处理器**执行接收信号(上行链路)的频率下变频。此模块确定中继器的类型。
**功率放大器**将频率下变频信号(下行链路)的功率放大到所需电平。
中继器的类型
基本上,有**两种类型**的中继器。它们是弯管中继器和再生中继器。
弯管中继器
弯管中继器接收微波频率信号。它将输入信号的频率转换为射频频率,然后放大它。
弯管中继器也称为中继器和**传统中继器**。它适用于模拟和数字信号。
再生中继器
再生中继器执行弯管中继器的功能。即频率转换和放大。除了这两个功能外,再生中继器还执行射频载波到基带的解调、信号再生和调制。
再生中继器也称为处理中继器。它仅适用于数字信号。再生中继器的主要**优点**是提高信噪比 (SNR) 以及在实现方面具有更大的灵活性。
地球段子系统
卫星通信系统的**地面段**主要由两个地面站组成。它们是发射地面站和接收地面站。
发射**地面站**将信息信号传输到卫星。而接收地面站则从卫星接收信息信号。有时,同一个地面站可以同时用于发射和接收。
通常,地面站以以下其中一种形式接收基带信号。语音信号和视频信号,可以是模拟形式也可以是数字形式。
最初,名为**调频调制**的模拟调制技术用于传输模拟形式的语音和视频信号。后来,数字调制技术,即频移键控**(FSK)**和相移键控**(PSK)**用于传输这些信号。因为,语音和视频信号都通过从模拟转换为数字来表示。
地面站框图
**地面站**的设计不仅取决于地面站的位置,还取决于其他一些因素。地面站的位置可以是陆地、海上船只和飞机上。相关因素包括提供的服务类型、频率段利用率、发射机、接收机和天线特性。
数字地面站的**框图**如下所示。
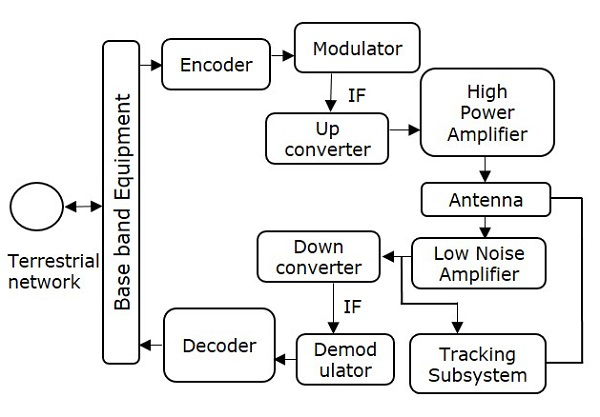
我们可以从上图轻松了解地面站的工作原理。任何地面站中都存在四个主要**子系统**。它们是发射机、接收机、天线和跟踪子系统。
发射机
二进制(数字)信息从地面网络进入地面站的基带设备。**编码器**包含纠错位,以最大程度地降低误码率。
在卫星通信中,可以使用带宽为 36 MHz 的中继器将中频**(IF)**选择为 70 MHz。类似地,还可以使用带宽为 54 MHz 或 72 MHz 的中继器将 IF 选择为 140 MHz。
上变频器将调制信号的频率转换为更高的频率。该信号将使用高功率放大器进行放大。地球站天线发射该信号。
接收机
在**接收**期间,地球站天线接收下行链路信号。这是一个低电平的调制射频信号。通常,接收到的信号信号强度较弱。因此,为了放大该信号,使用低噪声放大器**(LNA)**。这样可以提高信噪比**(SNR)**值。
射频信号可以**下变频**到中频**(IF)**值,该值可以是70或140 MHz。因为在这些中频更容易解调。
**解码器**的功能与编码器正好相反。因此,解码器通过去除纠错位并更正任何错误的位位置来产生无错误的二进制信息。
此二进制信息提供给基带设备进行进一步处理,然后传递到地面网络。
地球站天线
**地球站天线**的主要部分是馈电系统和天线反射器。这两部分组合在一起辐射或接收电磁波。由于馈电系统遵循互易定理,因此地球站天线适用于发射和接收电磁波。
**抛物面反射器**用作地球站中的主天线。这些反射器的增益很高。它们能够将平行光束聚焦到焦点处的一个点,馈电系统位于该点。
跟踪子系统
**跟踪子系统**跟踪卫星并确保光束朝向它以建立通信。地球站中存在的跟踪系统主要执行**两个功能**。分别是卫星捕获和卫星跟踪。可以通过以下几种方式之一进行跟踪。分别是自动跟踪、手动跟踪和程序跟踪。
地球站示例
在本章中,让我们讨论地球站的两个示例:**仅接收家庭电视系统**和**社区天线电视系统**。
仅接收家庭电视系统
如果广播直接到家庭电视接收机,则此类服务称为直接广播卫星**(DBS)**服务。
网状反射器可用于将信号聚焦到**双馈喇叭**中。它有两个独立的输出。一个输出将获得C波段信号,另一个输出将获得Ku波段信号。
电视节目主要源于第一代信号。这些信号通过卫星传输到C波段的网络主端站。这些信号被压缩并以数字形式传输到有线电视和DBS提供商。
C波段用户可以订阅付费电视频道。由于提供多源节目,因此与有线电视相比,这些订阅服务**更便宜**。
DBS电视接收机的**框图**如下图所示。
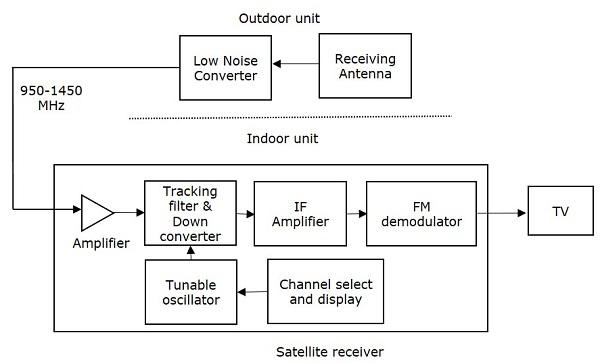
室外单元
室外单元主要由**接收天线**和低噪声转换器**(LNC)**组成。低噪声转换器(LNC)只不过是低噪声放大器(LNA)后面跟着一个转换器的组合。接收天线直接馈入LNC。
通常,**抛物面反射器**也与接收喇叭天线一起使用,以进一步聚焦光束。
室内单元
通常,馈送到室内单元的信号是宽带信号。该信号的频率介于950 MHz和1450 MHz之间。在室内单元中,该信号使用**放大器**进行放大。
放大后的信号施加到跟踪滤波器和下变频器。它选择所需的信道并将频率转换为70 MHz的**中频**(IF)。
**中频放大器**放大信号强度以便正确解调。基带(解调)信号用于生成残留边带信号(VSSB)。该信号馈入标准电视机的VHF/UHF信道之一。
DBS电视使用频率调制(FM)。而传统电视使用残留边带信号(VSSB)形式的幅度调制(AM)。这是DBS电视和传统电视之间的**主要区别**。
社区天线电视系统
社区天线电视**(CATV)**系统使用一个室外单元和多个馈电。这些馈电针对每个极化方向分别提供。因此,所有信道将同时出现在室内接收机上。
CATV系统室内单元的**框图**如下图所示。
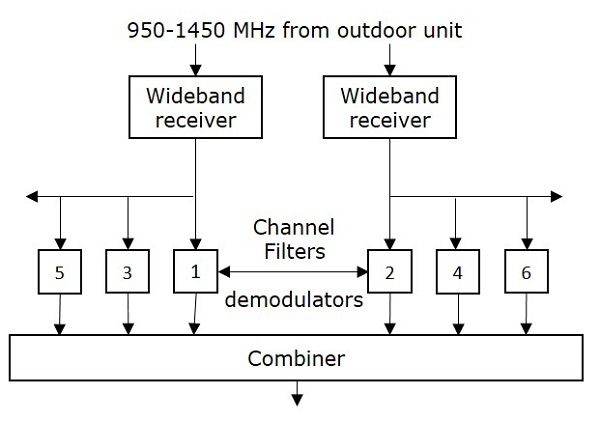
在这种情况下,每个用户不需要单独的接收机。因为所有载波都在一个公共接收器-滤波器系统中解调。之后,将信道组合成多路复用信号。然后,该信号通过电缆传输到用户(用户)。
卫星通信 - 链路预算
在卫星通信系统中,有两种类型的功率计算。分别是发射功率和接收功率计算。通常,这些计算称为**链路预算计算**。功率的单位是**分贝**。
首先,让我们讨论链路预算中使用的基本术语,然后我们将继续解释链路预算计算。
基本术语
**各向同性辐射器**(天线)向所有方向辐射相等。但实际上它并不存在。它只是一个理论天线。我们可以将所有真实(实用)天线的性能与该天线进行比较。
功率通量密度
假设一个各向同性辐射器位于半径为r的球体的中心。我们知道功率通量密度是功率流与单位面积之比。
各向同性辐射器的**功率通量密度**,$\Psi_i$为
$$\Psi_i = \frac{p_s}{4\pi r^2}$$
其中,$P_s$是功率流。通常,实际天线的功率通量密度随方向变化。但是,它的**最大值**仅在一个特定方向上。
天线增益
实际天线的**增益**定义为实际天线最大功率通量密度与各向同性天线功率通量密度之比。
因此,天线增益或**天线增益**G为
$$G = \frac{\Psi_m}{\Psi_i}$$
其中,$\Psi_m$是实际天线最大功率通量密度。$\Psi_i$是各向同性辐射器(天线)的功率通量密度。
等效各向同性辐射功率
等效各向同性辐射功率(EIRP)是链路预算测量中使用的主要参数。**数学上**,可以写成
$$EIRP = G\:\:P_s$$
我们可以用**分贝**表示EIRP为
$$\left [ EIRP \right ] = \left [ G \right ] + \left [ P_s \right ]dBW$$
其中,**G**是发射天线的增益,$P_s$是发射机的功率。
传输损耗
在一端发送的功率与接收站接收到的功率之间的差异称为**传输损耗**。损耗可分为两种类型。
- 恒定损耗
- 可变损耗
馈线损耗等恒定的损耗称为**恒定损耗**。无论我们采取了何种预防措施,这些损耗都必然会发生。
另一种损耗是**可变损耗**。天空和天气状况是这种损耗的一个例子。也就是说,如果天空不晴朗,信号将无法有效地到达卫星,反之亦然。
因此,我们的程序首先包括计算晴朗天气或晴朗天空条件下的损耗,因为这些损耗是恒定的。它们不会随时间变化。然后,在第二步中,我们可以计算恶劣天气条件下的损耗。
链路预算计算
由于有两个链路,即**上行链路**和**下行链路**,因此链路预算计算有两种类型。
地球站上行链路
它是地球将信号传输到卫星,而卫星接收信号的过程。其**数学方程**可以写成
$$\left(\frac{C}{N_0}\right)_U = [EIRP]_U+\left(\frac{G}{T}\right)_U - [LOSSES]_U -K$$
其中,
- $\left [\frac{C}{N_0}\right ]$是载噪比密度
- $\left [\frac{G}{T}\right ]$是卫星接收机的G/T比,单位为dB/K
此处,损耗表示卫星接收机的馈线损耗。所有依赖于频率的损耗都考虑在内。
为了有效地上行链路,EIRP值应尽可能低。当我们获得晴朗的天空条件时,这是可能的。
这里我们使用了(下标)表示法“U”,表示上行链路现象。
卫星下行链路
在此过程中,卫星发送信号,地球站接收信号。该方程与卫星上行链路相同,区别在于我们到处都使用缩写“D”而不是“U”来表示下行链路现象。
其**数学**方程可以写成:
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D - K$$
其中,
- $\left [\frac{C}{N_0}\right ]$是载噪比密度
- $\left [\frac{G}{T}\right ]$是地球站接收机的G/T比,单位为dB/K
这里,所有存在于地球站周围的损耗。
在上式中,我们没有包含信号带宽B。但是,如果我们包含该带宽,则方程将修改如下。
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D -K-B$$
链路预算
如果我们将地面卫星考虑在内,则还应考虑自由空间扩展损耗(FSP)。
如果天线未正确对准,则可能发生损耗。因此,我们考虑**AML**(天线未对准损耗)。类似地,当信号从卫星向地球传播时,它会与地球表面碰撞,其中一些会被吸收。这些由大气吸收损耗**“AA”**来处理,并以db为单位测量。
现在,我们可以为晴朗天空写出损耗方程为
$$损耗 = FSL + RFL + AML + AA + PL$$
其中,
RFL 代表接收馈线损耗,单位为 dB。
PL 代表极化失配损耗。
现在,接收功率的**分贝方程**可以写成
$$P_R = EIRP + G_R + 损耗$$
其中,
- $P_R$ 代表接收功率,以 dBW 为单位。
- $G_r$ 是接收天线增益。
下行链路的設計比上行链路的設計更关键。因为发射所需的功率和天线的增益存在限制。
多址接入技术
有时,卫星的服务在某个地球站位置存在,有时不存在。这意味着,一颗卫星可能在不同地点拥有不同的服务站。它们向卫星发送载波信号。
在这种情况下,我们使用多址接入技术,使卫星能够在不同时间从不同的站接收或发送信号,而不会相互干扰。以下是**三种**多址接入技术。
- FDMA(频分多址)
- TDMA(时分多址)
- CDMA(码分多址)
现在,让我们逐一讨论每种技术。
FDMA
在这种多址接入方式中,我们为每个信号分配不同的频段(范围)。因此,任何两个信号都不应该具有相同的频率范围。因此,即使我们在一个信道中发送这些信号,它们之间也不会发生干扰。
这种接入方式的一个完美的**例子**是我们的广播电台。我们可以看到,每个电台都被分配了不同的频段来进行操作。
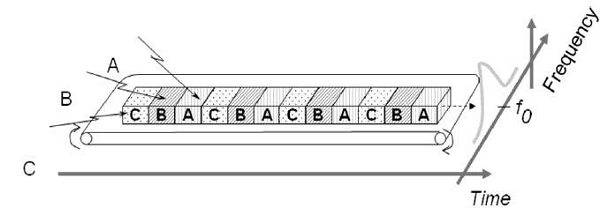
让我们考虑三个站点 A、B 和 C。我们希望通过 FDMA 技术访问它们。因此,我们为它们分配了不同的频段。
如图所示,卫星站 A 保持在 0 到 20 Hz 的频率范围内。类似地,站点 B 和 C 分别被分配了 30-60 Hz 和 70-90 Hz 的频率范围。它们之间没有干扰。
这种系统的主要**缺点**是它非常突发性。对于动态且不均匀的信道,不建议使用这种多址接入方式。因为它会使数据变得不灵活且效率低下。
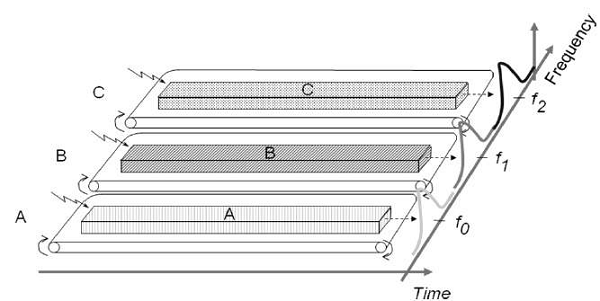
TDMA
顾名思义,TDMA 是一种基于时间的接入方式。在这里,我们为每个信道提供一定的时间帧。在该时间帧内,信道可以访问整个频谱带宽。
每个站点都有一个固定长度的时隙。未使用的时隙将保持空闲状态。
假设,我们希望使用 TDMA 技术向特定信道发送五个数据包。因此,我们应该为它们分配某些时隙或**时间帧**,在这些时隙或时间帧内,它可以访问整个带宽。
在上图中,数据包 1、3 和 4 是活动的,它们传输数据。而数据包 2 和 5 由于未参与而处于空闲状态。每次我们为该特定信道分配带宽时,此格式都会重复。
虽然我们已为特定信道分配了某些时隙,但它也可以根据负载能力进行更改。这意味着,如果一个信道传输较重的负载,则可以为其分配比传输较轻负载的信道更大的时隙。这是 TDMA 相对于 FDMA 的最大**优势**。TDMA 的另一个优势是功耗非常低。
**注意** - 在某些应用中,我们使用**TDMA 和 FDMA**技术的**组合**。在这种情况下,每个信道将在特定时间帧内在特定频段内运行。在这种情况下,频率选择更加鲁棒,并且它具有比时间压缩更大的容量。
CDMA
在 CDMA 技术中,为每个信道分配了一个唯一的代码,以区分彼此。这种多址接入方式的一个完美的**例子**是我们的蜂窝系统。我们可以看到,尽管他们都是使用相同带宽的相同 X 或 Y 移动服务提供商的客户,但没有两个人的手机号码是相同的。
在 CDMA 过程中,我们对编码信号和码片序列的内积进行解码。因此,在数学上可以写成
$$编码信号 = 原始数据 × 码片序列$$
这种多址接入方式的基本**优势**在于,它允许所有用户共存并在同一时间使用整个带宽。由于每个用户都有不同的代码,因此不会有任何干扰。
在这种技术中,许多站点可以拥有多个信道,这与 FDMA 和 TDMA 不同。这种技术最好的部分是每个站点都可以始终使用整个频谱。
卫星通信 - 服务
卫星通信的服务可以分为以下两类。
- 单向卫星通信链路服务
- 双向卫星通信链路服务
现在,让我们逐一讨论每种服务。
单向卫星通信链路服务
在**单向**卫星通信链路服务中,信息可以通过卫星从一个地球站传输到一个或多个地球站。这意味着,它提供点对点连接和点对多点连接。
下图显示了单向卫星通信链路服务的示例。
在这里,通信通过卫星在**一个方向**上在地球表面上的第一个地球站(发射器)和第二个地球站(接收器)之间进行。
以下是一些**单向**卫星通信链路**服务**。
广播卫星服务,如广播、电视和互联网服务。
空间操作服务,如遥测、跟踪和控制服务。
无线电测定卫星服务,如位置定位服务。
双向卫星通信链路服务
在**双向**卫星通信链路中,信息可以通过卫星在任何两个地球站之间交换。这意味着,它仅提供点对点连接。
下图显示了双向卫星通信链路服务的示例。
在这里,通信通过卫星在**两个**(两个)**方向**上在地球表面上的第一个地球站(发射器)和第二个地球站(接收器)之间进行。
以下是一些双向卫星通信链路**服务**。
固定卫星服务,如电话、传真和高比特率数据服务。
移动卫星服务,如陆地移动、海事和航空移动通信服务。
全球定位系统
**全球定位系统 (GPS)** 是一种基于卫星的导航系统。它引发了导航和位置定位的革命。它主要用于定位、导航、监控和测量应用。
卫星导航的主要**优势**是实时定位和时间同步。这就是为什么卫星导航系统已成为大多数应用中不可或缺的一部分,其中移动性是关键参数。
一个完整的 GPS 空间段包含 24 颗在中等地球轨道 (MEO) 上运行的卫星。这些卫星被分成 6 组,每组包含 4 颗卫星。4 颗卫星一组称为一个**星座**。任何两个相邻星座在经度上相隔 60 度。
每颗卫星的**轨道周期**大约等于**12 小时**。因此,所有卫星每天绕地球旋转两次。在任何时间,GPS 接收器都将接收来自至少 4 颗卫星的信号。
GPS 代码和服务
每颗 GPS 卫星发射两个信号,**L1 和 L2** 具有不同的频率。**三边测量**是一种查找 GPS 接收器位置(纬度、经度、高度)的简单方法。使用这种方法,可以根据三个已知点测量未知点的位置。
GPS 代码
以下是两种类型的 GPS 代码。
- 粗捕获码或 C/A 码
- 精密码或 P 码
信号 L1 以 1.023 Mbps 伪随机比特序列进行调制。此代码称为粗捕获码或**C/A 码**,供公众使用。
信号 L2 以 10.23 Mbps 伪随机比特序列进行调制。此代码称为精密码或**P 码**,用于军事定位系统。通常,此 P 码以加密格式传输,称为**Y 码**。
与 C/A 码相比,P 码具有更好的测量精度,因为 P 码的比特率大于 C/A 码的比特率。
GPS 服务
以下是 GPS 提供的两种服务。
- 精密定位服务 (PPS)
- 标准定位服务 (SPS)
**PPS 接收器**跟踪两个信号 L1 和 L2 上的 C/A 码和 P 码。Y 码在接收器处被解密以获取 P 码。
**SPS 接收器**仅跟踪信号 L1 上的 C/A 码。
GPS 接收器
在 GPS 系统中,卫星到用户的传输是单向的。因此,单个用户不需要发射器,只需要一个**GPS 接收器**。它主要用于查找物体的准确位置。它通过使用从卫星接收到的信号来执行此任务。
GPS 接收器的**框图**如下图所示。
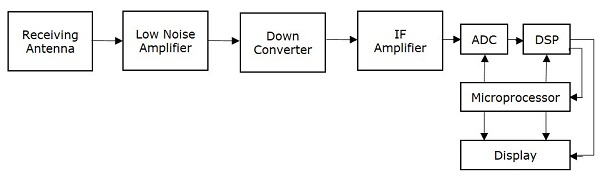
GPS 接收器中每个模块的功能如下所述。
**接收天线**接收卫星信号。它主要是一个圆极化天线。
**低噪声放大器** (LNA) 放大微弱的接收信号。
**下变频器**将接收信号的频率转换为中频 (IF) 信号。
**中频放大器**放大中频 (IF) 信号。
**ADC** 执行从 IF 放大器获得的模拟信号到数字信号的转换。假设采样和量化模块也存在于 ADC(模数转换器)中。
**DSP**(数字信号处理器)生成 C/A 码。
**微处理器**执行位置计算并提供时序信号以控制其他数字模块的操作。它将有用的信息发送到显示单元,以便在屏幕上显示。