
 数据结构
数据结构 网络
网络 关系型数据库管理系统
关系型数据库管理系统 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 语言编程
C 语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP三相感应电动机的构造
一个三相感应电动机主要由两部分组成:
- 定子
- 转子
转子和定子之间由一个小的空气隙隔开,空气隙的范围从 0.5 毫米到 4 毫米不等,具体取决于电动机的额定功率。
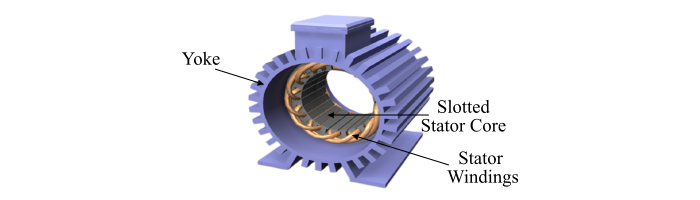
三相感应电动机的定子
定子是电动机的静止部分。它由一个钢制框架组成,该框架包围着一个空心圆柱形铁芯。三相感应电动机的铁芯由硅钢薄片制成,以减少涡流损耗和磁滞损耗。
在叠片铁芯的内圆周上设置了许多等间距的槽,如图所示。绝缘导体放置在这些定子槽中,并以适当的方式连接以形成平衡的三相星形或三角形连接的定子绕组。
三相定子绕组绕制成一定数量的磁极,这取决于速度的要求,即磁极数越多,电动机的速度越低,反之亦然。
当向定子绕组馈入平衡的三相电源时,会产生一个幅值恒定的旋转磁场 (RMF),并且该旋转磁场通过电磁感应在转子回路中感应电流。
三相感应电动机的转子
一个感应电动机的转子是一个空心圆柱形叠片铁芯,其外圆周上设有槽。转子绕组放置在这些转子槽中。
根据绕组的布置,三相感应电动机的转子有两种类型:
- 鼠笼式转子
- 绕线式或滑环式转子
鼠笼式转子
鼠笼式转子由一个圆柱形叠片铁芯组成,其外圆周上设有槽,这些槽几乎平行于轴线或倾斜。每个槽中放置一根未绝缘的铜或铝条(转子导体)。
在转子的每一端,转子导体条由相同材料制成的重型端环短路(参见图)。这形成了一个永久短路的绕组,该绕组坚不可摧。这种整体布置类似于曾经常用来饲养松鼠的笼子,因此得名。

该转子不与电源电气连接,但通过定子的电磁感应在其上感应电流。
采用鼠笼式转子的三相感应电动机称为鼠笼式感应电动机。工业中大多数三相感应电动机都使用鼠笼式转子,因为它的结构简单、坚固,使其能够在最恶劣的环境中运行。不过,它也存在启动转矩低的缺点。
鼠笼式转子导体的倾斜具有以下优点:
- 降低了运行过程中的噪音。
- 产生了更均匀的转矩。
- 降低了转子的齿槽效应或磁性锁定趋势。在齿槽效应期间,转子和定子齿由于磁作用而相互锁定。
绕线式转子或滑环式转子
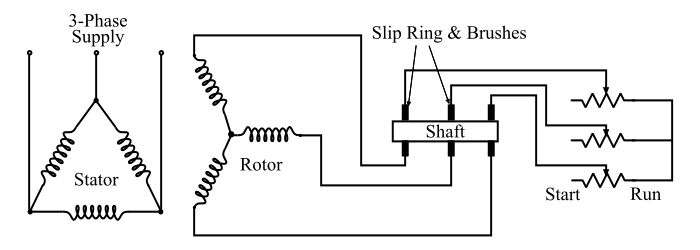
滑环式转子由一个叠片圆柱形电枢铁芯组成。在外部圆周上设有槽,绝缘导体被放置在槽中。转子导体连接形成一个类似于定子绕组的三相双层分布绕组。转子绕组呈星形连接(参见图)。

星形电路的开口端引出转子并连接到三个绝缘滑环。滑环安装在转子轴上,并有刷子接触滑环。刷子连接到三个可变电阻,这些电阻也呈星形连接。在这里,滑环和刷子用于提供一种方法,用于将外部电阻连接到转子电路。绕线式转子的等效电路如下图所示。
外部电阻使每个转子相电阻能够变化,以实现以下两个目的:
- 增加启动转矩并减少电源的启动电流。
- 控制电动机的速度。

31K+ 浏览量
