
 数据结构
数据结构 网络
网络 RDBMS
RDBMS 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 编程
C 编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP同步定位与地图构建
介绍
同步定位与地图构建(SLAM)是一种让我们同时构建地图并在该地图上定位车辆的方法。SLAM 算法用于未知环境建模和同步定位。
SLAM 如何有用?
工程师可以使用 SLAM 来避开障碍物,还可以将其用于路径规划。
SLAM 软件允许机器人系统、无人机或自动驾驶汽车在未知环境和复杂地形中找到路径。此过程涉及大量计算和处理能力。
SLAM 可用于绘制对人类勘探来说太小或太危险的区域的地图
SLAM 的工作原理
同步定位与地图构建中使用了两种类型的技术。
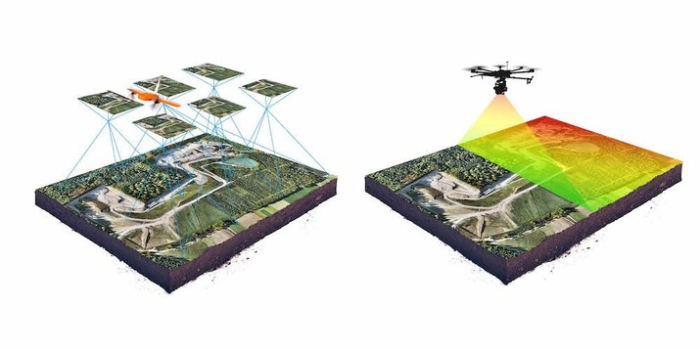
第一种(距离测量),前端处理器包含信号处理器或传感器,并且在很大程度上取决于传感器类型及其效率。SLAM 解决方案包括允许机器人或其他车辆观察周围环境的外部设备。这可以是摄像头、强大的传感器或激光雷达,以测量环境的物理属性,如位置、距离或速度。
第二种(数据提取和后处理),是后端堆栈,它不包含任何传感器,但可以接收来自前端的信号并进行位姿图优化。“后端”解决方案用于提取传感器或测量仪器收集的数据。这些信息经过处理并用于识别周围环境中的地标。它们可能包含运行高效算法的复杂计算机软件。
让我们看一下一些前端处理组件。
激光雷达
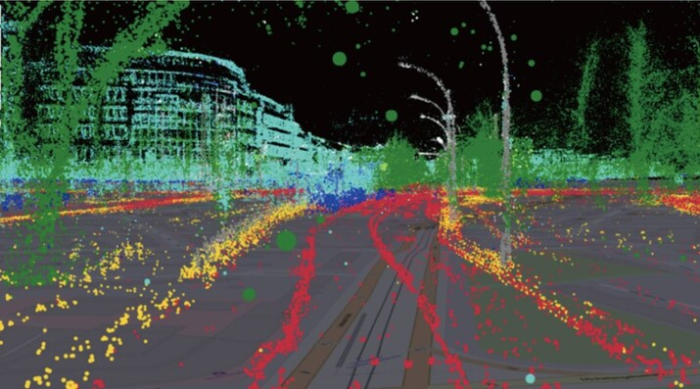
激光雷达代表光探测和测距。它使用光传感器来定位陌生的物体。它们是同步定位最流行的方法。激光雷达技术使用光能通过使用激光束来收集来自物理环境的数据,该激光束在击中目标时会反射回来,然后测量光束返回所需的时间。此过程用于生成未知地形的精确地图和周围环境的 3D 模型。
激光雷达需要的操作能量很少。它可以使用激光束或高能光源(人眼可能看不见)来收集任何障碍物的高度精确数据。机器人使用 2D 激光雷达 SLAM。在自动驾驶汽车中,我们通常使用 3D 激光雷达 SLAM。
尽管激光雷达需要在后端进行一些处理,但其不断下降的成本使其使用越来越普遍。
视觉 SLAM
它使用从摄像头和其他图像传感器获得的图像。这些摄像头可以从简单的摄像头到能够捕获广角、全景和鱼眼图像的复杂摄像头系统。RGB、夜视和立体摄像头也很受欢迎。其中一些摄像头系统价格低廉,并且能够感知环境中的大量信息,并检测地标,最终有助于图优化。深度感应摄像头比单目摄像头更强大,因为它们可以感知深度并提供更精确的测量,以及可以捕获方向和速度的惯性测量单元。
同步定位与地图构建的用途
SLAM 已被广泛用于研究以及数十年的技术和理论应用。但是,由于组件(激光雷达、摄像头等)成本的下降,SLAM 正在被普遍使用。
1. 清洁机器人
我们可能经常在许多普通家庭中遇到清洁机器人。此类机器人也基于同步定位的原理工作。如果没有 SLAM,清洁机器人只会在地板上移动,无法检测障碍物或记住之前清洁过的地方。使用 SLAM,真空吸尘器机器人可以定位和绘制地板地图,并且还可以有效地避开任何类型的障碍物。

2. AR/VR 应用
虚拟现实系统可以使用 SLAM 驱动的系统来改善其触觉、反馈、音频质量、显示和人工智能组件。
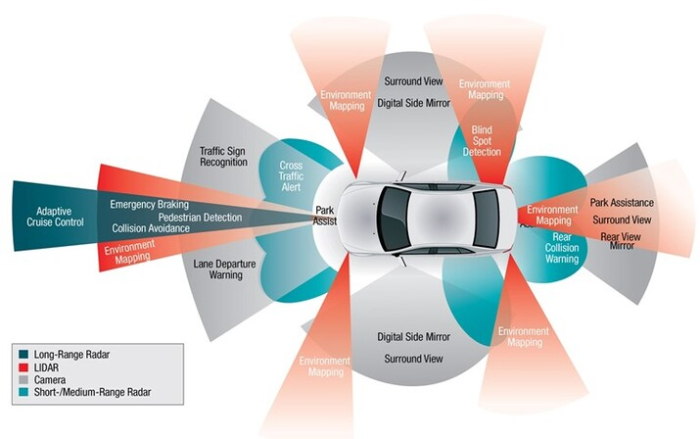
3. 自动驾驶汽车
自动驾驶汽车大量使用 SLAM 技术来绘制路径和车辆周围环境的地图。它使用多种传感器(如激光雷达、GPS、摄像头等)来感知环境参数。自动驾驶汽车可以使用 SLAM 系统进行车道检测、路径传播、识别交通状况,以及读取交通标志和信号灯。如今,我们拥有高效的 GPS 传感器,可以帮助 SLAM 系统实现精确的地理定位。
结论
SLAM 是一项新兴技术,尽管它已被用于十多年的研究和应用。SLAM 技术有可能为我们的智能系统提供一个领域,让他们了解如何感知其物理环境并有效地与其交互。

256 次浏览
