
 数据结构
数据结构 网络
网络 关系数据库管理系统(RDBMS)
关系数据库管理系统(RDBMS) 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C语言编程
C语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP感应电机速度控制
感应电机的转子速度 (Nr) 由下式给出:
$$\mathrm{𝑁_𝑟 = (1 − 𝑠)𝑁_𝑠}$$
同步速度由下式给出:
$$\mathrm{𝑁_𝑠 =\frac{120𝑓}{𝑃}… (1)}$$
因此,电机的转子速度由下式给出:
$$\mathrm{𝑁_𝑟 = (1 − 𝑠) (\frac{120𝑓}{𝑃}) … (2)}$$
从公式 (2) 可以看出,可以通过改变频率 (f)、极数 (P) 或滑差 (s) 来改变感应电机的速度。
变频控制的感应电机速度控制
从公式 (1) 和 (2) 可以看出,可以通过改变电源频率来控制同步速度,从而控制电机的速度。
感应电机定子中的感应电动势由下式给出:
$$\mathrm{𝐸_𝑠 = 4.44 𝑘_{𝑤𝑠} 𝑓\varphi 𝑁_1 … (3)}$$
公式 (3) 表明,如果改变电源频率,定子电动势 Es 也将发生变化,以保持电机气隙中的磁通量不变。如果忽略定子电压降,则施加的端电压 Vs 等于感应电动势 Es。
为了最小化损耗并避免铁心饱和,电机通过根据电源频率 (f) 改变端电压 (Vs) 来在额定气隙磁通量下运行,以保持 (V/f) 比值恒定在额定值。因此,这种类型的速度控制也称为恒电压/赫兹控制。
因此,从以上讨论可以看出,使用变频电源控制感应电机速度需要一个变压电源。为了获得变频电源,可以使用以下变流器:
- 电压源逆变器 – 逆变器是一种将固定电压直流电转换为固定或可变电压交流电(具有可变频率)的电路。
- 电流源逆变器 – 电流源逆变器将输入直流电转换为交流电。CSI 的输出电压与负载无关。
- 变频器 – 变频器将固定电压和固定频率的交流电源转换为可变电压和可变频率的交流电源。可变频率将低于固定频率。变频器控制的感应电机驱动器仅适用于大型电力驱动器和获得低速。
变频控制的速度控制允许从鼠笼式感应电机获得良好的运行和暂态性能。
感应电机的转子电阻控制
转子电阻控制速度控制方法用于改变滑环式感应电机的速度。此方法不适用于鼠笼式感应电机。在这种方法中,通过通过滑环在转子电路中连接外部电阻来控制滑环式或绕线转子感应电机的速度(如图所示)。
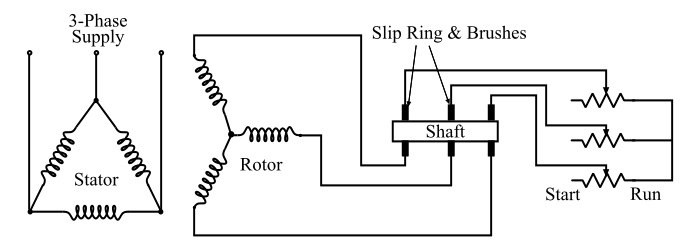
感应电机的最大转矩与转子电阻无关。转子电阻 R2 的值越大,发生最大转矩的滑差值越大。当转子电阻增加时,电机的拉出速度降低,但最大转矩值保持不变。因此,使用转子电阻法,速度控制从额定速度提供到较低速度。
转子电阻速度控制方法非常简单。使用这种方法,可以实现较高的启动转矩、较低的启动电流和较大的击穿或拉出转矩(在较小的滑差值下)。
转子电阻控制方法的主要缺点是,由于连接在转子电路中的外部电阻器中存在额外的 I2R 损耗,因此电机的效率较低。
这种速度控制方法用于起重机、Ward-Leonard Ilgener 驱动器和其他间歇性负载应用。
感应电机的滑差能量回收
在感应电机的转子电阻速度控制方法中,在电机的低速运行期间,转子电路中的滑差功率作为I 2R 损耗而浪费。因此,通过这种速度控制方法降低了电机的效率。
可以回收转子电路中的滑差功率并反馈到交流电源。因此,可以提高电机的整体效率。滑差能量回收的原理是将滑差频率的外部电动势连接到转子电路。该图显示了回收滑差能量的电路布置。
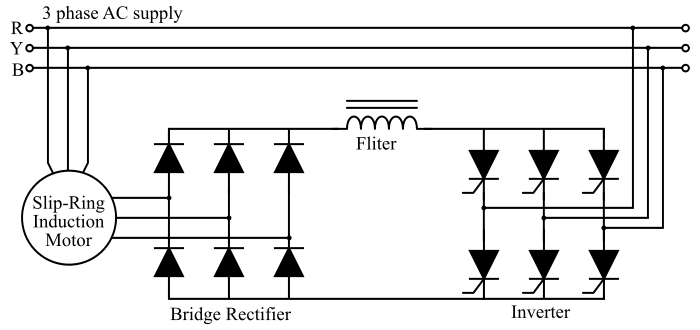
图中所示的滑差能量回收方法称为静态Scherbius驱动器。它提供了低于同步速度的滑环式感应电机的控制。在这种方法中,滑差功率由二极管桥式整流器转换为直流电源,并且整流电流借助滤波电路(平滑电抗器)进行平滑处理。然后将整流器的输出馈送到逆变器,该逆变器将此直流功率反相为交流功率并反馈到交流电源。所使用的逆变器是在反相模式下运行的受控整流器。
滑差能量回收速度控制方法用于大型电力应用,在这些应用中,大范围的速度变化涉及大量的滑差功率。

浏览量 11K+
