
 数据结构
数据结构 网络
网络 关系数据库管理系统 (RDBMS)
关系数据库管理系统 (RDBMS) 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C语言编程
C语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP变极法控制感应电动机的转速
感应电动机的转子转速 (Nr) 为:
$$\mathrm{𝑁_𝑟 = (1 − 𝑠)𝑁_𝑠}$$
同步转速为:
$$\mathrm{𝑁_𝑠 =\frac{120𝑓}{𝑃}}$$
因此,
$$\mathrm{𝑁_𝑟 = (1 − 𝑠) (\frac{120𝑓}{𝑃}) … (1)}$$
从公式 (1) 可以看出,可以通过改变频率 (f)、极数 (P) 或滑差 (s) 来改变感应电动机的转速。
变极法控制感应电动机的转速
通过改变定子极数可以改变感应电动机的转速。改变定子极数的方法有:
- 多绕组定子
- 次极法,以及
- 极幅调制 (PAM)
变极法转速控制适用于鼠笼式感应电动机,因为鼠笼式感应电动机自动产生与定子绕组极数相同的转子极数。
多绕组定子
在多绕组定子转速控制法中,定子设有两个独立绕组,分别绕制成两种不同的极数。一次只激磁一个定子绕组。例如,假设一台电动机有两个定子绕组,分别为 4 极和 8 极。对于 60 Hz 的电源,同步转速分别为 1800 RPM 和 900 RPM。如果每种情况下满载滑差均为 4%,则运行速度分别为 1728 RPM 和 864 RPM。
这种感应电动机转速控制方法效率低且成本高,因此仅在绝对必要时才使用。
由于定子绕组互连的设计和切换比较复杂,这种方法最多只能为任何一台电动机提供四种不同的同步转速。
次极法
在次极法中,单个定子绕组被分成两个线圈组。两个线圈组的端子都引出。只需简单地改变线圈连接方式即可改变机器的极数。极数变化比为 2:1。
图中显示了定子绕组的一个相。此处,定子绕组由 4 个线圈组成,分为两组 a-b 和 c-d。a-b 组由奇数线圈组成,即 1 和 3,串联连接。c-d 组由偶数线圈组成,即 2 和 4,串联连接。这些线圈的端子 a、b、c 和 d 如图 1 所示引出。
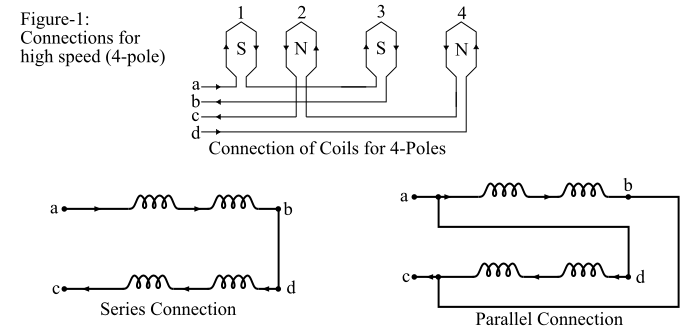
在这种布置下,电动机将有 4 个极,对于 50 Hz 的电源系统,同步转速为 1500 RPM。现在,如果反转 a-b 组线圈中的电流,则所有线圈都会产生北极。因此,为了完成磁路,北极的磁通必须穿过线圈组之间的间隙,从而在线圈组之间的间隙中感应出南极(相反极性的极)。这些感应极被称为次极(参见图 2)。因此,电动机的极数现在是原来的两倍(即 8 极),同步转速是之前速度的一半(即 750 RPM)。两组线圈组 a-b 和 c-d 可以串联连接以获得一个速度,或并联连接以获得电动机的另一个速度。

上述原理可以推广到感应电动机的三个相。
通过选择三相感应电动机各相线圈组之间合适的串联或并联连接组合以及星形或三角形连接,可以获得恒转矩运行、恒功率运行或变转矩运行的转速控制。

6000+ 次浏览
