
 数据结构
数据结构 网络
网络 关系数据库管理系统 (RDBMS)
关系数据库管理系统 (RDBMS) 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C 语言编程
C 语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP感应电机定子电压控制调速
感应电动机产生的转矩由下式给出:
$$\mathrm{\tau_𝑑 =\frac{𝑘 𝑠 𝐸_{20}^2 𝑅_2}{𝑅_2^2 + 𝑠^2𝑋_{20}^2} … (1)}$$
其中:
- k = 比例常数,
- s = 滑差率,
- E20 = 转子静止时每相感应电动势,
- R2 = 转子回路电阻,以及
- X20 = 转子静止时每相电抗
并且,对应于最大转矩的滑差率由下式给出:
$$\mathrm{𝑠_𝑚 =\frac{𝑅_2}{𝑋_{20}}… (2)}$$
三相感应电动机的速度可以通过改变电源电压来改变。公式 (1) 表明电动机产生的转矩与电源电压的平方成正比,公式 (2) 表明对应于最大转矩的滑差率与电源电压无关。此外,电源电压的变化不会改变电动机的同步速度。该图显示了三相感应电动机在不同电源电压下的转矩-速度特性。
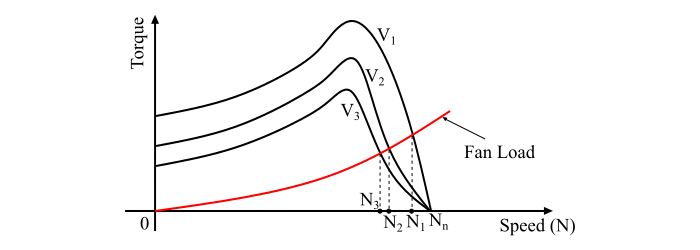
三相感应电动机的速度控制是通过改变电源电压来实现的,直到在所需速度下产生负载所需的转矩。感应电动机产生的转矩与电源电压的平方成正比,电流与电压成正比。因此,当降低电源电压以降低相同电流下的速度时,电动机产生的转矩会降低。因此,定子电压控制方法适用于负载转矩随速度降低的应用,例如风扇负载。
通过定子电压控制方法,电动机的速度可以在较小的范围内变化。由于不允许电动机在高于额定电压的电压下工作,因此此方法仅允许在电动机的额定速度以下进行速度控制。
当需要电动机间歇运行时,定子电压控制方法更适用。此方法也适用于驱动风扇或泵的感应电动机的速度控制,其中负载转矩随速度的平方而变化,因为这些电动机驱动器在低速时需要低转矩,这可以通过较低的施加电压来实现,而不会产生过大的电机电流。
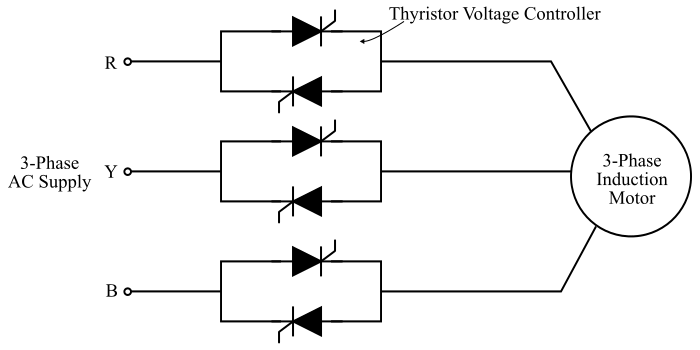
用于三相感应电动机速度控制的可变电压可以通过使用晶闸管电压控制器来获得。这里需要三对背靠背连接的晶闸管,每相一个(参见电路图)。每对晶闸管控制其连接到的相位的电压。电动机的速度控制是通过改变晶闸管的导通时间来实现的。
重要提示 – 对于低功率额定运行,每相的背靠背晶闸管对可以替换为可控硅。

13K+ 次浏览
