
 数据结构
数据结构 网络
网络 关系数据库管理系统 (RDBMS)
关系数据库管理系统 (RDBMS) 操作系统
操作系统 Java
Java iOS
iOS HTML
HTML CSS
CSS Android
Android Python
Python C语言编程
C语言编程 C++
C++ C#
C# MongoDB
MongoDB MySQL
MySQL Javascript
Javascript PHP
PHP沃德-列昂纳德调速法
沃德-列昂纳德调速法基于这样一个事实:直流电动机的速度可以通过改变施加到电枢的电压来改变。沃德-列昂纳德法的示意图如图所示。
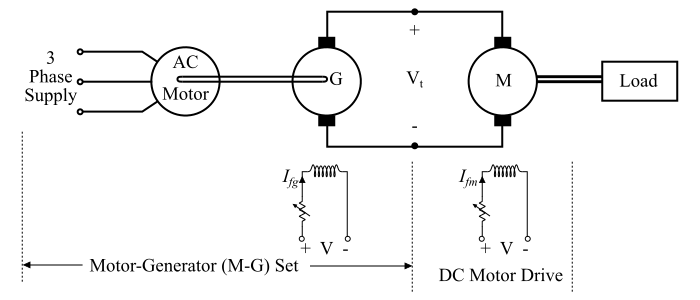
在沃德-列昂纳德系统中,M是需要控制速度的直流电动机,G是由三相异步电动机或同步电动机驱动的他励直流发电机。交流驱动电动机和直流发电机的组合被称为电动发电机组或M-G组。
通过改变发电机的励磁电流,可以改变发电机的电压。当这个变化的电压施加到直流电动机M上时,它会改变电动机的速度。在此,直流电动机的励磁电流Ifm保持在其额定值不变,而直流发电机的励磁电流Ifg以使发电机电压Vt从零变到其额定值的方式变化。因此,电动机的速度从零变到其额定值。
由于速度控制是在电动机的额定电枢电流Ia和恒定的电动机磁通ϕm下进行的,因此电动机在其额定速度以下产生恒定的转矩(τ∝ϕmIa)。由于电动机产生的功率与速度成正比,因此它随速度增加而增加。因此,*采用电枢电压控制方法,在直流电动机额定速度以下获得恒转矩和变功率驱动。*
为了控制高于额定速度的速度,采用*磁通控制法*。在这种方法中,电动机的电枢电流(Ia)固定在其额定值,发电机电压Vt也保持恒定。现在降低电动机的励磁电流(Ifm),因此降低电动机磁通(ϕm)。因此,直流电动机的速度增加。
由于功率(VtIa)保持不变,因此随着磁通的减小,电磁转矩减小。因此,转矩随着电动机速度的增加而减小。因此,*采用磁通控制方法,在电动机额定速度以上获得恒功率和变转矩驱动。*
当需要在较宽范围内控制速度时,采用电枢电压控制和磁通控制的组合。通过这种组合,最大可用速度与最小可用速度之比为20到40。
如果使用过励磁同步电动机而不是异步电动机来驱动发电机,则可以提高系统的功率因数。由于过励磁同步电动机以超前功率因数运行,则同步电动机产生的超前无功功率可以用来补偿系统中其他感性负载消耗的滞后无功功率。因此,提高了系统的功率因数。
当负载较重且间歇性时,使用滑环异步电动机来驱动直流发电机。在其轴上安装一个飞轮以防止电源电流发生剧烈波动。该方案称为*沃德-列昂纳德II型方案*。
沃德-列昂纳德系统还有另一种形式,其中使用非电气原动机(如柴油发动机或燃气轮机)来驱动直流发电机。
沃德-列昂纳德系统的优点
以下是沃德-列昂纳德系统的主要优点:
- 可以实现直流电动机在宽范围内平稳的速度控制。
- 直流电动机的速度可以双向控制。
- 它具有固有的再生制动能力。
- 通过使用过励磁同步电动机作为原动机,可以提高整个系统的功率因数。
- 当负载较重且间歇性时,使用滑环异步电动机作为原动机,并在其轴上安装飞轮以使间歇性负载平滑到较小的值。
沃德-列昂纳德系统的缺点
沃德-列昂纳德调速法存在以下缺点:
- 由于存在M-G组,初始成本很高。
- 体积较大,因此需要更多地面面积。
- 重量大。
- 需要频繁维护。
- 效率非常低。
- 噪音较大。
沃德-列昂纳德系统的应用
沃德-列昂纳德驱动器用于需要在两个方向上对直流电动机进行宽范围平稳速度控制的场合,例如:
- 轧钢厂
- 造纸厂
- 矿井提升机
- 起重机和电梯
- 柴油电力机车等。

8000+ 次浏览
