雷达系统 - 连续波雷达
基本雷达使用相同的天线进行信号的发送和接收。当目标静止(即不移动)和/或雷达可以使用脉冲信号工作时,我们可以使用这种类型的雷达。
使用连续信号(波)检测非静止目标的雷达称为连续波雷达或简称CW 雷达。这种雷达需要两个天线。其中一个天线用于发送信号,另一个天线用于接收信号。
CW 雷达的框图
我们知道,CW 多普勒雷达包含两个天线:发射天线和接收天线。下图显示了 CW 雷达的框图:
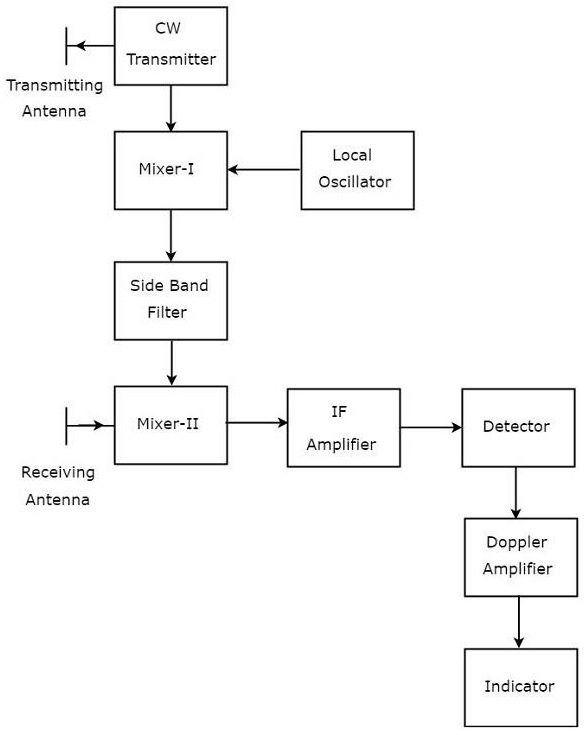
CW 多普勒雷达的框图包含一组模块,每个模块的功能如下所述。
CW 发射器 - 它产生频率为 $f_o$ 的模拟信号。CW 发射器的输出连接到发射天线和混频器 I。
本地振荡器 - 它产生频率为 $f_l$ 的信号。本地振荡器的输出连接到混频器 I。
混频器 I - 混频器可以产生施加到其上的频率的和与差。频率为 $f_o$ 和 $f_l$ 的信号施加到混频器 I。因此,混频器 I 将产生频率为 $f_o+f_l$ 或 $f_o−f_l$ 的输出。
边带滤波器 - 顾名思义,边带滤波器允许特定的边带频率 - 上边带频率或下边带频率。上图所示的边带滤波器仅产生上边带频率,即 $f_o+f_l$。
混频器 II - 混频器可以产生施加到其上的频率的和与差。频率为 $f_o+f_l$ 和 $f_o\pm f_d$ 的信号施加到混频器 II。因此,混频器 II 将产生频率为 2$f_o+f_l\pm f_d$ 或 $f_l\pm f_d$ 的输出。
中频放大器 - 中频放大器放大中频 (IF) 信号。图中所示的中频放大器仅允许中频 $f_l\pm f_d$ 并放大它。
检波器 - 它检测具有多普勒频率 $f_d$ 的信号。
多普勒放大器 - 顾名思义,多普勒放大器放大具有多普勒频率 $f_d$ 的信号。
指示器 - 它指示与相对速度相关的信息以及目标是入射还是出射。
CW 多普勒雷达可以精确测量相对速度。因此,它们主要用于速度信息比实际距离更重要的场合。