雷达系统 - 双工器
在双向通信中,如果我们应该使用同一根天线进行信号的发送和接收,那么我们需要双工器。双工器是一种微波开关,它在信号传输时将天线连接到发射机部分。因此,雷达在传输期间无法接收信号。
同样,它在信号接收时将天线连接到接收机部分。雷达在接收期间无法发送信号。这样,双工器隔离了发射机和接收机部分。
双工器的类型
在本节中,我们将学习不同类型的双工器。我们可以将双工器分为以下三种类型。
- 支路型双工器
- 平衡双工器
- 环行器作为双工器
在接下来的章节中,我们将详细讨论双工器的类型。
支路型双工器
支路型双工器由两个开关组成——收发开关 (TR) 和反收发开关 (ATR)。下图显示了支路型双工器的框图:
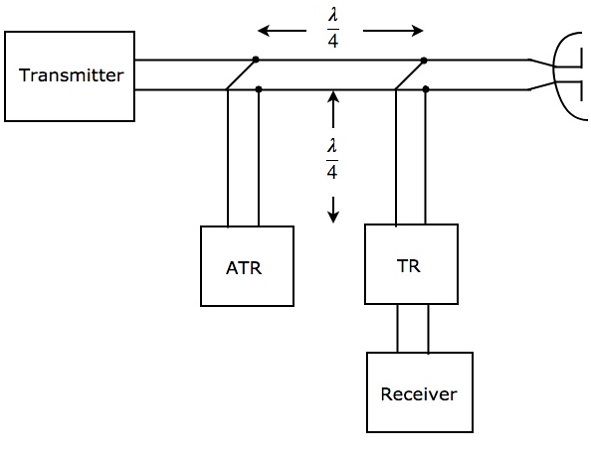
如图所示,两个开关 TR 和 ATR 与传输线的距离为 λ/4,并且两个开关彼此相隔 λ/4 的距离。支路型双工器的工作原理如下所述。
在传输期间,TR 和 ATR 对传输线来说都像开路一样。因此,天线将通过传输线连接到发射机。
在接收期间,ATR 将在传输线上看起来像短路。因此,天线将通过传输线连接到接收机。
支路型双工器仅适用于低成本雷达,因为它具有较低的功率处理能力。
平衡双工器
我们知道,双孔定向耦合器是一个四端口波导结,由一个主波导和一个副波导组成。有两个小孔,它们将是这两个波导共有的。
平衡双工器由两个 TR 管组成。用于传输目的的平衡双工器配置如下图所示。
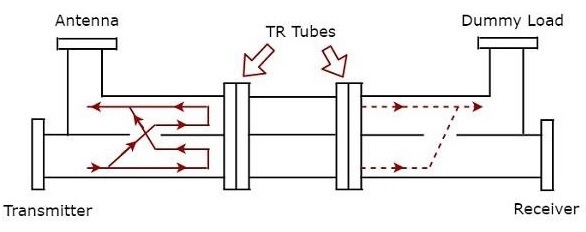
发射机产生的信号必须到达天线,以便天线在传输时间内传输该信号。上图中显示的带箭头实线表示信号如何从发射机到达天线。
上图中显示的带箭头的虚线表示从双 TR 管泄漏的信号;这只会到达匹配负载。因此,没有信号到达接收机。
用于接收目的的平衡双工器配置如下图所示。
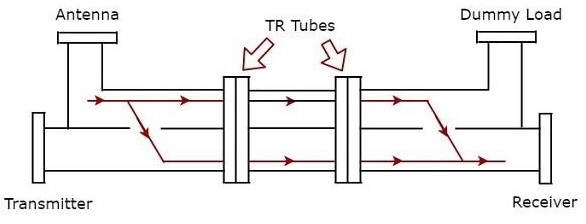
我们知道天线在接收时间接收信号。天线接收到的信号必须到达接收机。上图中显示的带箭头实线表示信号如何从天线到达接收机。在这种情况下,双 TR 管将信号从波导的第一部分传递到波导的下一部分。
与支路型双工器相比,平衡双工器具有更高的功率处理能力和更高的带宽。
环行器作为双工器
我们知道环行器的功能是,如果我们将输入应用于一个端口,那么它将在顺时针方向相邻的端口产生输出。环行器的其余端口没有输出。
因此,考虑一个四端口环行器,并将发射机、天线、接收机和匹配负载分别连接到端口 1、端口 2、端口 3 和端口 4。现在,让我们了解四端口环行器如何用作双工器。
发射机产生的信号必须到达天线,以便天线在传输时间内传输该信号。当发射机在端口 1 产生信号时,将实现此目的。
天线接收到的信号必须在接收时间到达接收机。当位于端口 2 的天线接收外部信号时,将实现此目的。
下图显示了作为双工器的环行器的框图:
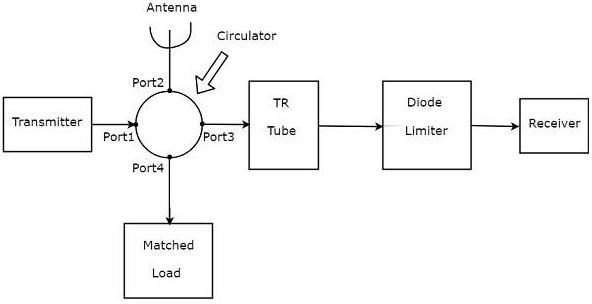
上图由一个四端口环行器组成——发射机、天线和匹配负载分别连接到环行器的端口 1、端口 2 和端口 4,如本节开头所述。
接收机没有直接连接到端口 3。相反,对应于无源 TR 限幅器的模块放置在环行器的端口 3 和接收机之间。TR 管和二极管限幅器是对应于无源 TR 限幅器的模块。
实际上,环行器本身充当双工器。它不需要任何额外的模块。但是,它不会对接收机提供任何保护。因此,使用对应于无源 TR 限幅器的模块是为了保护接收机。