雷达系统 - 跟踪雷达
用于跟踪一个或多个目标轨迹的雷达称为跟踪雷达。一般来说,它在开始跟踪活动之前会执行以下功能。
- 目标检测
- 目标距离
- 查找仰角和方位角
- 查找多普勒频移
因此,跟踪雷达通过跟踪三个参数之一来跟踪目标——距离、角度、多普勒频移。大多数跟踪雷达使用角度跟踪原理。现在,让我们讨论一下什么是角度跟踪。
角度跟踪
雷达天线的窄波束执行角度跟踪。雷达天线的轴线被视为参考方向。如果目标方向与参考方向不相同,则会出现角度误差,它只不过是两个方向之间的差异。
如果将角度误差信号应用于伺服控制系统,则它将使雷达天线的轴线朝向目标方向移动。当角度误差为零时,雷达天线的轴线和目标方向将重合。跟踪雷达中存在一个反馈机制,它会一直工作,直到角度误差变为零。
以下是角度跟踪中使用的两种技术。
- 顺序扫描
- 锥形扫描
现在,让我们逐一讨论这两种技术。
顺序扫描
如果天线波束在两个模式之间交替切换以跟踪目标,则称为顺序扫描。它也称为顺序切换和瓣切换。此技术用于在一个坐标中查找角度误差。它提供了角度误差的大小和方向的详细信息。
下图显示了极坐标系中顺序扫描的一个示例。
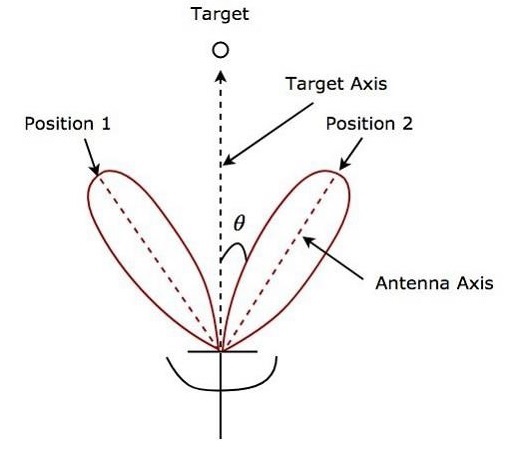
如图所示,天线波束在位置 1 和位置 2 之间交替切换。上图中指示了角度误差 θ。顺序扫描以高精度给出目标的位置。这是顺序扫描的主要优势。
锥形扫描
如果天线波束持续旋转以跟踪目标,则称为锥形扫描。锥形扫描调制用于查找目标的位置。下图显示了锥形扫描的一个示例。
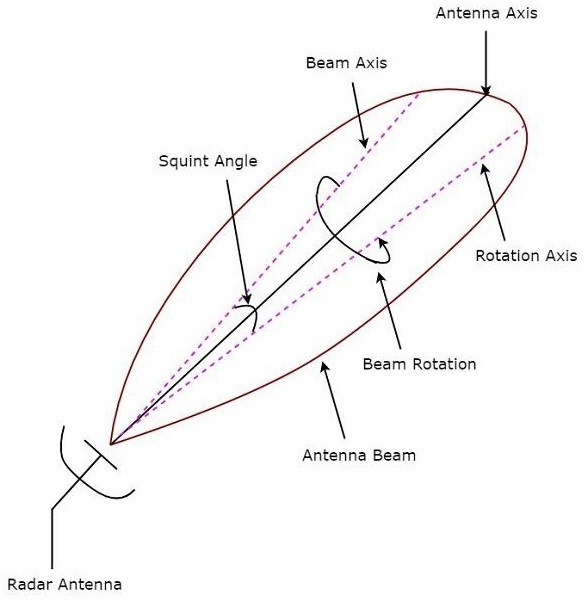
偏角是波束轴线和旋转轴线之间的角度,如上图所示。从目标获得的回波信号以等于天线波束旋转频率的频率进行调制。
目标方向与旋转轴线之间的角度决定了调制信号的幅度。因此,必须从回波信号中提取锥形扫描调制,然后将其应用于伺服控制系统,该系统将天线波束轴线移动到目标方向。
广告