- 电机教程
- 电机 - 首页
- 基本概念
- 机电能量转换
- 储存在磁场中的能量
- 单激和双激系统
- 旋转电机
- 法拉第电磁感应定律
- 感应电动势的概念
- 弗莱明左手定则和右手定则
- 变压器
- 电力变压器
- 变压器的构造
- 变压器的电动势方程
- 匝数比和电压变换比
- 理想变压器和实际变压器
- 直流变压器
- 变压器的损耗
- 变压器的效率
- 三相变压器
- 变压器的类型
- 直流电机
- 直流电机的构造
- 直流电机的类型
- 直流发电机的原理
- 直流发电机的电动势方程
- 直流发电机的类型
- 直流电机的原理
- 直流电机中的反电动势
- 直流电机的类型
- 直流电机的损耗
- 直流电机的应用
- 感应电机
- 感应电机的介绍
- 单相感应电机
- 三相感应电机
- 三相感应电机的构造
- 三相感应电机负载运行
- 三相感应电动机的特性
- 调速和速度控制
- 三相感应电机启动方法
- 同步电机
- 三相同步电机的介绍
- 同步电机的构造
- 三相交流发电机的运行
- 同步电机中的电枢反应
- 三相交流发电机的输出功率
- 三相交流发电机的损耗和效率
- 三相同步电机的运行
- 同步电机的等效电路和功率因数
- 同步电机产生的功率
- 电机资源
- 电机 - 快速指南
- 电机 - 资源
- 电机 - 讨论
三相感应电动机的特性
三相感应电机的运行性能可以用以下两个特性来解释:
转矩-滑差特性
转矩-速度特性
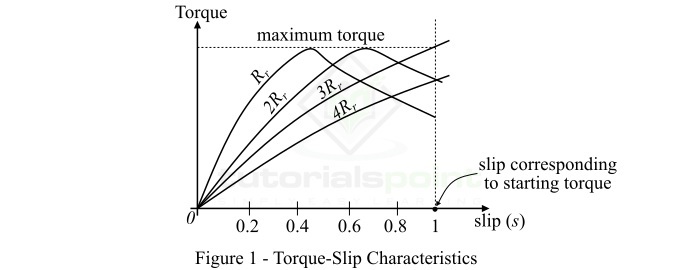
三相感应电机的转矩-滑差特性
三相感应电机的**转矩-滑差特性**是电机转矩和滑差在特定转子电阻值下绘制的曲线。图1显示了典型三相感应电机在滑差范围为s = 0到s = 1的不同转子电阻值下的不同转矩-滑差特性。
对于三相感应电机,运行条件下电机转矩和滑差之间的关系由下式给出:
$$ \mathrm{\mathit{\tau _{r}}\:=\:\frac{\mathit{KsR_{r}}}{\mathit{R_{r}^{\mathrm{2}}+s^{\mathrm{2}}X_{r}^{\mathrm{2}}}}\:\cdot \cdot \cdot (1)} $$
其中,**K** 是常数,s 是滑差,$\mathit{R_{r}}$ 是每相转子电阻,$\mathit{X_{r}}$ 是每相静止转子电抗。
从公式1,我们可以得出以下几点:
情况1
如果s = 0,则$\mathit{\tau _{r}}\:=\:0$。因此,转矩-滑差曲线从原点开始。
情况2
在电机的正常速度下,滑差很小,因此$\mathit{sX_{r}}$与$\mathit{R_{r}}$相比可以忽略不计。
$$ \mathrm{\therefore \mathit{\tau _{r}}\propto \mathit{\frac{s}{R_{r}}}} $$
由于对于给定的电机,$\mathit{R_{r}}$也是常数。
$$ \mathrm{\therefore \mathit{\tau _{r}}\propto \mathit{s}} $$
因此,转矩-滑差曲线是从零滑差到对应于满载滑差的直线。
情况3
如果滑差值超过满载滑差,则转矩增加,当$\mathit{R _{r}}\:=\:\mathit{s\:X_{r}}$时达到最大值。三相感应电机中的这个最大转矩称为**击穿转矩**或**拉出转矩**。当感应电机在额定电压和频率下运行时,击穿转矩的值至少是满载转矩的两倍。
情况4
当滑差值大于对应于最大转矩的滑差值时,$\mathit{s^{\mathrm{2}}\:X_{r}^{\mathrm{2}}}$项迅速增加,因此$\mathit{R_{r}^{\mathrm{2}}}$可以忽略不计。
$$ \mathrm{\therefore \mathit{\tau _{r}}\propto \mathit{\frac{s}{s^{\mathrm{2}}X_{r}^{\mathrm{2}}}}} $$
由于$\mathit{X_{r}^{\mathrm{2}}}$实际上是常数,则
$$ \mathrm{\mathit{\tau _{r}}\propto \mathit{\frac{\mathrm{1}}{s}}} $$
因此,转矩现在与滑差成反比。因此,转矩-滑差曲线是矩形双曲线。
因此,从以上对三相感应电机转矩-滑差特性的分析可以看出,向转子电路增加电阻不会改变最大转矩的值,而只会改变发生最大转矩的滑差值。
三相感应电机的转矩-速度特性
对于三相感应电机,电机转矩取决于速度,但我们不能用简单的数学方程来表达它们之间的关系。因此,我们使用转矩-速度特性曲线来显示这种关系。图2显示了三相感应电机的典型转矩-速度特性曲线。
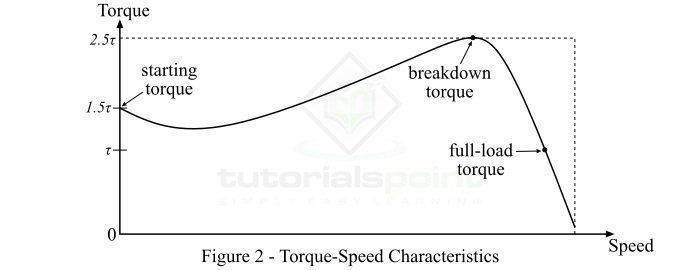
从该特性曲线可以看出以下几点:
如果满载转矩为$\tau$,则启动转矩为$1.5\tau$,最大转矩(或击穿转矩)为$2.5\tau$
在满载情况下,如果电机的速度为N,如果轴上的机械负载增加,电机的速度将下降,直到电机转矩再次等于负载转矩。一旦两个转矩相等,电机将以恒定速度运行,但低于之前的速度。然而,如果电机转矩大于$2.5\tau$(即击穿转矩),电机将突然停止。
对于三相感应电机,转矩-速度曲线在空载和满载点之间基本上是一条直线。曲线线的斜率取决于转子电路的电阻,即电阻越大,斜率越陡。