- 数字图像处理
- DIP - 首页
- DIP - 图像处理简介
- DIP - 信号与系统简介
- DIP - 摄影史
- DIP - 应用与用途
- DIP - 维度概念
- DIP - 相机成像
- DIP - 相机机制
- DIP - 像素概念
- DIP - 透视变换
- DIP - 每像素比特数概念
- DIP - 图像类型
- DIP - 颜色代码转换
- DIP - 灰度到RGB转换
- DIP - 采样概念
- DIP - 像素分辨率
- DIP - 放大概念
- DIP - 放大方法
- DIP - 空间分辨率
- DIP - 每英寸像素、点和线
- DIP - 灰度分辨率
- DIP - 量化概念
- DIP - ISO 标准曲线
- DIP - 抖动概念
- DIP - 直方图简介
- DIP - 亮度和对比度
- DIP - 图像变换
- DIP - 直方图滑动
- DIP - 直方图拉伸
- DIP - 概率论简介
- DIP - 直方图均衡化
- DIP - 灰度变换
- DIP - 卷积概念
- DIP - 掩膜概念
- DIP - 模糊概念
- DIP - 边缘检测概念
- DIP - Prewitt算子
- DIP - Sobel算子
- DIP - Robinson罗盘掩膜
- DIP - Krisch罗盘掩膜
- DIP - 拉普拉斯算子
- DIP - 频域分析
- DIP - 傅里叶级数和变换
- DIP - 卷积定理
- DIP - 高通滤波器与低通滤波器
- DIP - 颜色空间简介
- DIP - JPEG压缩
- DIP - 光学字符识别
- DIP - 计算机视觉与图形学
- DIP 有用资源
- DIP - 快速指南
- DIP - 有用资源
- DIP - 讨论
透视变换
当人眼看近处物体时,相比远处物体看起来更大。这通常被称为透视。而变换是指物体等从一种状态转换到另一种状态。
总的来说,透视变换处理的是将三维世界转换为二维图像的过程。这与人眼的视觉原理相同,也与相机的工作原理相同。
我们将详细探讨为什么近处的物体看起来更大,而远处的物体看起来更小,即使当你靠近它们时,它们看起来会更大。
我们将从参考系的概念开始讨论。
参考系
参考系基本上是一组参考值,我们根据这些值来测量某事物。
五个参考系
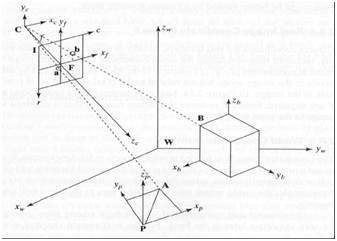
为了分析三维世界/图像/场景,需要五个不同的参考系。
- 物体
- 世界
- 相机
- 图像
- 像素
1. 物体坐标系
物体坐标系用于对物体建模。例如,检查特定物体相对于其他物体是否处于正确位置。它是一个三维坐标系。
2. 世界坐标系
世界坐标系用于关联三维世界中的物体。它是一个三维坐标系。
3. 相机坐标系
相机坐标系用于关联相对于相机的物体。它是一个三维坐标系。
4. 图像坐标系
它不是三维坐标系,而是一个二维系统。它用于描述如何将三维点映射到二维图像平面。
5. 像素坐标系
它也是一个二维坐标系。每个像素都有一个像素坐标值。
Explore our latest online courses and learn new skills at your own pace. Enroll and become a certified expert to boost your career.
这五个参考系之间的变换
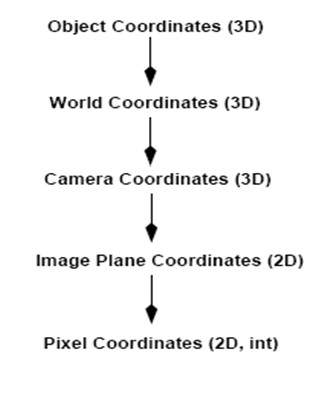
这就是三维场景如何转换为具有像素图像的二维图像。
现在我们将用数学方法解释这个概念。
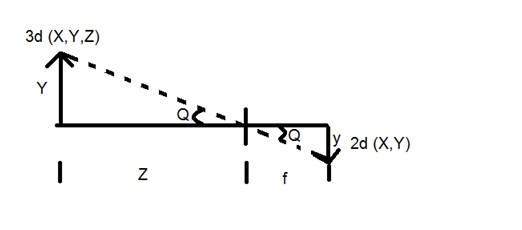
其中
Y = 三维物体
y = 二维图像
f = 相机的焦距
Z = 物体与相机之间的距离
现在,在这个变换中形成了两个不同的角度,用Q表示。
第一个角度是
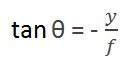
其中负号表示图像倒置。形成的第二个角度是
比较这两个方程,我们得到
从这个方程可以看出,当光线从物体反射后经过相机时,会形成一个倒立的图像。
我们可以通过这个例子更好地理解这一点。
例如
计算所成图像的大小
假设拍摄了一个身高5米的人的图像,此人距离相机50米,我们必须说明,如果相机的焦距为50毫米,则该人的图像大小是多少。
解答
由于焦距以毫米为单位,因此为了计算,我们必须将所有内容都转换为毫米。
所以,
Y = 5000 毫米。
f = 50 毫米。
Z = 50000 毫米。
将这些值代入公式,我们得到

= -5 毫米。
再次,负号表示图像倒置。