
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气类比
- 控制系统 - 方块图
- 方块图代数
- 方块图化简
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 波德图
- 波德图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 方块图化简
前面章节中讨论的概念有助于化简(简化)方块图。
方块图化简规则
遵循以下规则来简化(化简)包含许多方块、加法点和取样点的方块图。
规则 1 - 检查串联连接的方块并进行简化。
规则 2 - 检查并联连接的方块并进行简化。
规则 3 - 检查反馈回路中的方块并进行简化。
规则 4 - 如果在简化过程中取样点出现问题,将其向右移动。
规则 5 - 如果在简化过程中加法点出现问题,将其向左移动。
规则 6 - 重复上述步骤,直到得到简化形式,即单个方块。
注意 - 此单个方块中存在的传递函数是整个方块图的传递函数。
示例
考虑下图所示的方块图。让我们使用方块图化简规则来简化(化简)此方块图。
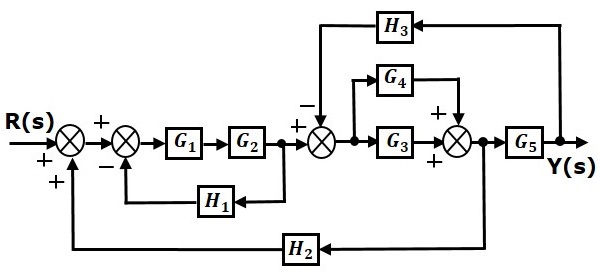
步骤 1 - 对方块 $G_1$ 和 $G_2$ 使用规则 1。对方块 $G_3$ 和 $G_4$ 使用规则 2。修改后的方块图如下所示。
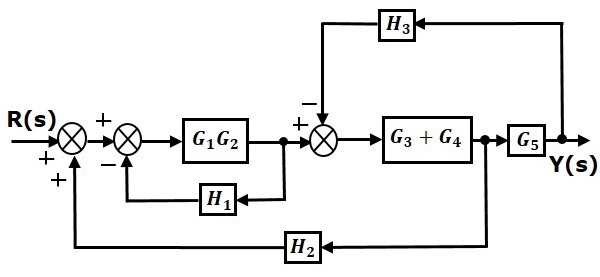
步骤 2 - 对方块 $G_1G_2$ 和 $H_1$ 使用规则 3。对方块 $G_5$ 后面的取样点使用规则 4 进行移动。修改后的方块图如下所示。
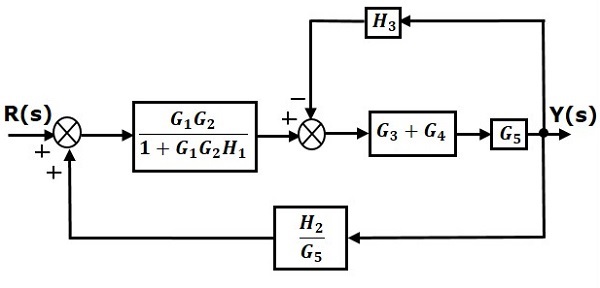
步骤 3 - 对方块 $(G_3 + G_4)$ 和 $G_5$ 使用规则 1。修改后的方块图如下所示。
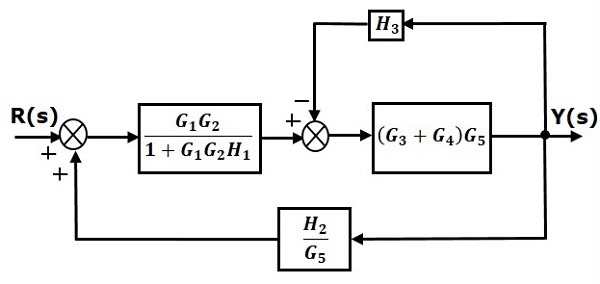
步骤 4 - 对方块 $(G_3 + G_4)G_5$ 和 $H_3$ 使用规则 3。修改后的方块图如下所示。
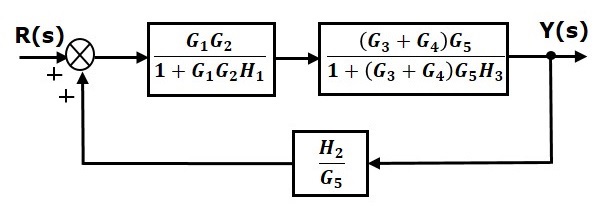
步骤 5 - 对串联连接的方块使用规则 1。修改后的方块图如下所示。
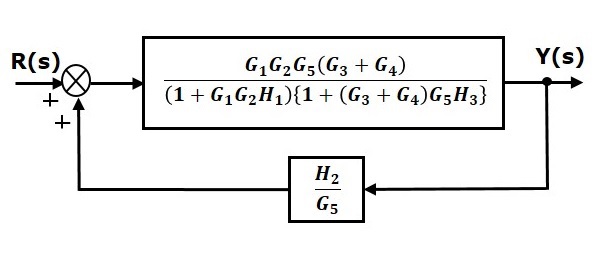
步骤 6 - 对反馈回路中的方块使用规则 3。修改后的方块图如下所示。这是简化的方块图。
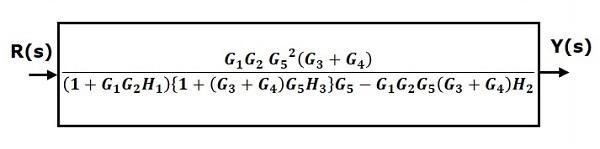
因此,系统的传递函数为
$$\frac{Y(s)}{R(s)}=\frac{G_1G_2G_5^2(G_3+G_4)}{(1+G_1G_2H_1)\lbrace 1+(G_3+G_4)G_5H_3\rbrace G_5-G_1G_2G_5(G_3+G_4)H_2}$$
注意 - 为了计算具有多个输入的方块图的传递函数,请按顺序执行以下步骤。
步骤 1 - 通过一次考虑一个输入并使其余输入为零来找到方块图的传递函数。
步骤 2 - 对其余输入重复步骤 1。
步骤 3 - 通过将所有这些传递函数相加来获得总的传递函数。
对于复杂的系统,方块图化简过程需要更多时间。因为,我们必须在每个步骤之后绘制(部分简化)的方块图。因此,为了克服这个缺点,可以使用信号流图(表示)。
在接下来的两章中,我们将讨论与信号流图相关的概念,即如何从给定的方块图中表示信号流图,以及仅使用增益公式而不进行任何化简过程即可计算传递函数。