
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 绪论
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气等效
- 控制系统 - 方框图
- 方框图代数
- 方框图简化
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 波德图
- 波德图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 补偿器
补偿器有三种类型:滞后补偿器、超前补偿器和滞后-超前补偿器。这些是最常用的。
滞后补偿器
滞后补偿器是一种电网络,当施加正弦输入时,它会产生具有相位滞后的正弦输出。以下图显示了“s”域中的滞后补偿器电路。
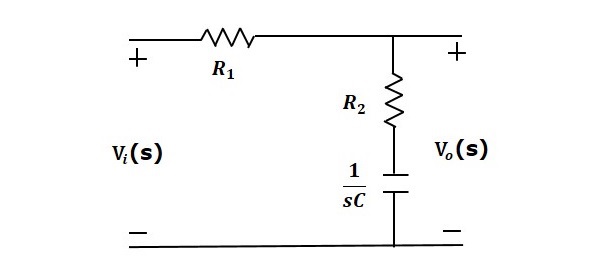
此处,电容与电阻R₂串联,输出电压在此组合上测量。
该滞后补偿器的传递函数为:
Vo(s)Vi(s)=1α(s+1τs+1ατ)
其中:
τ=R2C
α=R1+R2R2
从上式可知,α总是大于1。
从传递函数可以看出,滞后补偿器在s = − 1/(ατ)处有一个极点,在s = −1/τ处有一个零点。这意味着在滞后补偿器的零极点配置中,极点更靠近原点。
将s = jω代入传递函数。
Vo(jω)Vi(jω)=1α(jω+1τjω+1ατ)
相角 φ = arctan(ωτ) − arctan(αωτ)
我们知道,输出正弦信号的相位等于输入正弦信号和传递函数的相位之和。
因此,为了在这个补偿器的输出端产生相位滞后,传递函数的相角应该为负。当α > 1时,就会发生这种情况。
超前补偿器
超前补偿器是一种电网络,当施加正弦输入时,它会产生具有相位超前的正弦输出。以下图显示了“s”域中的超前补偿器电路。
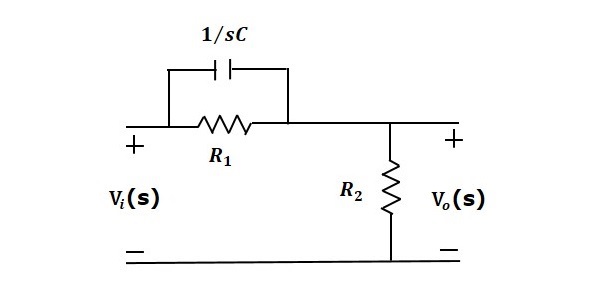
此处,电容与电阻R₁并联,输出电压在电阻R₂上测量。
该超前补偿器的传递函数为:
Vo(s)Vi(s)=β(sτ+1βsτ+1)
其中:
τ=R1C
β=R2R1+R2
从传递函数可以看出,超前补偿器在s = −1/β处有一个极点,在s = −1/(βτ)处有一个零点。
将s = jω代入传递函数。
Vo(jω)Vi(jω)=β(jωτ+1βjωτ+1)
相角 φ = arctan(ωτ) − arctan(βωτ)
我们知道,输出正弦信号的相位等于输入正弦信号和传递函数的相位之和。
因此,为了在这个补偿器的输出端产生相位超前,传递函数的相角应该为正。当0 < β < 1时,就会发生这种情况。因此,在超前补偿器的零极点配置中,零点更靠近原点。
Explore our latest online courses and learn new skills at your own pace. Enroll and become a certified expert to boost your career.
滞后-超前补偿器
滞后-超前补偿器是一种电网络,在一个频率区域产生相位滞后,在另一个频率区域产生相位超前。它是滞后补偿器和超前补偿器的组合。以下图显示了“s”域中的滞后-超前补偿器电路。
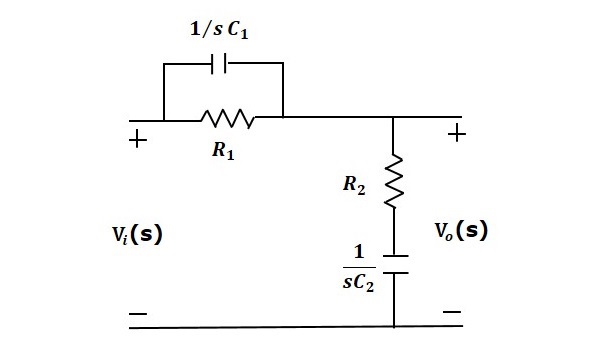
该电路看起来像是两个补偿器级联连接。因此,该电路的传递函数将是超前补偿器和滞后补偿器传递函数的乘积。
Vo(s)Vi(s)=β(sτ1+1βsτ1+1)1α(s+1τ2s+1ατ2)
我们知道αβ=1。
⇒Vo(s)Vi(s)=(s+1τ1s+1βτ1)(s+1τ2s+1ατ2)
其中:
τ1=R1C1
τ2=R2C2