
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气模拟
- 控制系统 - 方框图
- 方框图代数
- 方框图化简
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 波德图
- 波德图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 稳定性
稳定性是一个重要的概念。在本章中,我们将讨论系统的稳定性和基于稳定性的系统类型。
什么是稳定性?
如果系统的输出处于控制之下,则称该系统是稳定的。否则,则称其为不稳定的。对于给定的有界输入,**稳定系统**产生有界输出。
下图显示了稳定系统的响应。
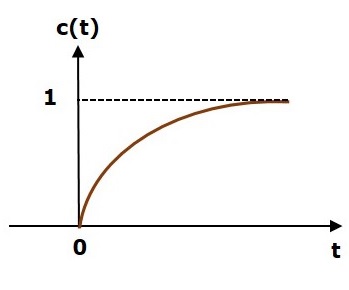
这是单位阶跃输入的一阶控制系统的响应。该响应的值介于 0 和 1 之间。因此,它是界输出。我们知道,单位阶跃信号对于所有正值t(包括零)的值都为 1。因此,它是界输入。因此,一阶控制系统是稳定的,因为输入和输出都是有界的。
基于稳定性的系统类型
我们可以根据稳定性将系统分类如下。
- 绝对稳定系统
- 条件稳定系统
- 临界稳定系统
绝对稳定系统
如果系统在所有系统组件值范围内都稳定,则称为**绝对稳定系统**。如果开环传递函数的所有极点都位于‘s’平面**的左半部分,则开环控制系统是绝对稳定的。类似地,如果闭环传递函数的所有极点都位于‘s’平面的左半部分,则闭环控制系统是绝对稳定的。
条件稳定系统
如果系统在某个系统组件值范围内稳定,则称为**条件稳定系统**。
临界稳定系统
如果系统在产生具有恒定幅度和恒定频率振荡的输出信号以响应有界输入时是稳定的,则称为**临界稳定系统**。如果开环传递函数的任意两个极点位于虚轴上,则开环控制系统是临界稳定的。类似地,如果闭环传递函数的任意两个极点位于虚轴上,则闭环控制系统是临界稳定的。
广告