
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气模拟
- 控制系统 - 方框图
- 方框图代数
- 方框图简化
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 波特图
- 波特图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
二阶系统的响应
本章我们将讨论二阶系统的时间响应。考虑以下闭环控制系统的方框图。这里,开环传递函数$\frac{\omega ^2_n}{s(s+2\delta \omega_n)}$连接到一个单位负反馈。
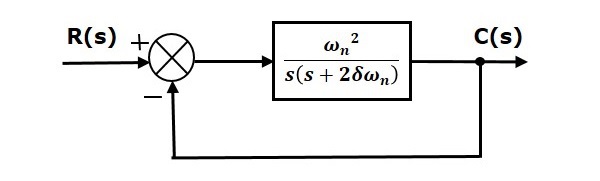
我们知道具有单位负反馈的闭环控制系统的传递函数为
$$\frac{C(s)}{R(s)}=\frac{G(s)}{1+G(s)}$$
将$G(s)=\frac{\omega ^2_n}{s(s+2\delta \omega_n)}$代入上式。
$$\frac{C(s)}{R(s)}=\frac{\left (\frac{\omega ^2_n}{s(s+2\delta \omega_n)} \right )}{1+ \left ( \frac{\omega ^2_n}{s(s+2\delta \omega_n)} \right )}=\frac{\omega _n^2}{s^2+2\delta \omega _ns+\omega _n^2}$$
分母项中's'的幂为二。因此,上述传递函数是二阶的,该系统被称为二阶系统。
特征方程为:
$$s^2+2\delta \omega _ns+\omega _n^2=0$$
特征方程的根为:
$$s=\frac{-2\omega \delta _n\pm \sqrt{(2\delta\omega _n)^2-4\omega _n^2}}{2}=\frac{-2(\delta\omega _n\pm \omega _n\sqrt{\delta ^2-1})}{2}$$
$$\Rightarrow s=-\delta \omega_n \pm \omega _n\sqrt{\delta ^2-1}$$
- 当δ = 0时,两个根是虚数。
- 当δ = 1时,两个根是实数且相等。
- 当δ > 1时,两个根是实数但不相等。
- 当0 < δ < 1时,两个根是复共轭。
我们可以将C(s)方程写成:
$$C(s)=\left ( \frac{\omega _n^2}{s^2+2\delta\omega_ns+\omega_n^2} \right )R(s)$$
其中:
C(s)是输出信号c(t)的拉普拉斯变换
R(s)是输入信号r(t)的拉普拉斯变换
ωn是自然频率
δ是阻尼比。
按照以下步骤获得时域中二阶系统的响应(输出)。
对输入信号$r(t)$进行拉普拉斯变换。
考虑方程$C(s)=\left ( \frac{\omega _n^2}{s^2+2\delta\omega_ns+\omega_n^2} \right )R(s)$
在上式中代入R(s)的值。
如果需要,对C(s)进行部分分式分解。
对C(s)进行拉普拉斯反变换。
二阶系统的阶跃响应
将单位阶跃信号作为二阶系统的输入。
单位阶跃信号的拉普拉斯变换为:
$$R(s)=\frac{1}{s}$$
我们知道二阶闭环控制系统的传递函数为:
$$\frac{C(s)}{R(s)}=\frac{\omega _n^2}{s^2+2\delta\omega_ns+\omega_n^2}$$
情况1:δ = 0
将δ = 0代入传递函数。
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{s^2+\omega_n^2}$$
$$\Rightarrow C(s)=\left( \frac{\omega_n^2}{s^2+\omega_n^2} \right )R(s)$$
在上式中代入$R(s) = \frac{1}{s}$。
$$C(s)=\left( \frac{\omega_n^2}{s^2+\omega_n^2} \right )\left( \frac{1}{s} \right )=\frac{\omega_n^2}{s(s^2+\omega_n^2)}$$
对等式两边进行拉普拉斯反变换。
$$c(t)=\left ( 1-\cos(\omega_n t) \right )u(t)$$
因此,当δ = 0时,二阶系统的单位阶跃响应将是一个具有恒定幅度和频率的连续时间信号。
情况2:δ = 1
将δ = 1代入传递函数。
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{s^2+2\omega_ns+\omega_n^2}$$
$$\Rightarrow C(s)=\left( \frac{\omega_n^2}{(s+\omega_n)^2} \right)R(s)$$
在上式中代入$R(s) = \frac{1}{s}$。
$$C(s)=\left( \frac{\omega_n^2}{(s+\omega_n)^2} \right)\left ( \frac{1}{s} \right)=\frac{\omega_n^2}{s(s+\omega_n)^2}$$
对C(s)进行部分分式分解。
$$C(s)=\frac{\omega_n^2}{s(s+\omega_n)^2}=\frac{A}{s}+\frac{B}{s+\omega_n}+\frac{C}{(s+\omega_n)^2}$$
简化后,将得到A、B和C的值分别为1、-1和$-\omega _n$。将这些值代入C(s)的部分分式展开式。
$$C(s)=\frac{1}{s}-\frac{1}{s+\omega_n}-\frac{\omega_n}{(s+\omega_n)^2}$$
对等式两边进行拉普拉斯反变换。
$$c(t)=(1-e^{-\omega_nt}-\omega _nte^{-\omega_nt})u(t)$$
因此,二阶系统的单位阶跃响应将试图在稳态下达到阶跃输入。
情况3:0 < δ < 1
我们可以修改传递函数的分母项如下:
$$s^2+2\delta\omega_ns+\omega_n^2=\left \{ s^2+2(s)(\delta \omega_n)+(\delta \omega_n)^2 \right \}+\omega_n^2-(\delta\omega_n)^2$$
$$=(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)$$
传递函数变为:
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
$$\Rightarrow C(s)=\left( \frac{\omega_n^2}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)} \right )R(s)$$
在上式中代入$R(s) = \frac{1}{s}$。
$$C(s)=\left( \frac{\omega_n^2}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)} \right )\left( \frac{1}{s} \right )=\frac{\omega_n^2}{s\left ((s+\delta\omega_n)^2+\omega_n^2(1-\delta^2) \right)}$$
对C(s)进行部分分式分解。
$$C(s)=\frac{\omega_n^2}{s\left ((s+\delta\omega_n)^2+\omega_n^2(1-\delta^2) \right)}=\frac{A}{s}+\frac{Bs+C}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
简化后,将得到A、B和C的值分别为1、-1和$-2\delta \omega _n$。将这些值代入C(s)的部分分式展开式。
$$C(s)=\frac{1}{s}-\frac{s+2\delta\omega_n}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
$$C(s)=\frac{1}{s}-\frac{s+\delta\omega_n}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}-\frac{\delta\omega_n}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
$C(s)=\frac{1}{s}-\frac{(s+\delta\omega_n)}{(s+\delta\omega_n)^2+(\omega_n\sqrt{1-\delta^2})^2}-\frac{\delta}{\sqrt{1-\delta^2}}\left ( \frac{\omega_n\sqrt{1-\delta^2}}{(s+\delta\omega_n)^2+(\omega_n\sqrt{1-\delta^2})^2} \right )$
在上式中将$\omega_n\sqrt{1-\delta^2}$代之以$\omega_d$。
$$C(s)=\frac{1}{s}-\frac{(s+\delta\omega_n)}{(s+\delta\omega_n)^2+\omega_d^2}-\frac{\delta}{\sqrt{1-\delta^2}}\left ( \frac{\omega_d}{(s+\delta\omega_n)^2+\omega_d^2} \right )$$
对等式两边进行拉普拉斯反变换。
$$c(t)=\left ( 1-e^{-\delta \omega_nt}\cos(\omega_dt)-\frac{\delta}{\sqrt{1-\delta^2}}e^{-\delta\omega_nt}\sin(\omega_dt) \right )u(t)$$
$$c(t)=\left ( 1-\frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}}\left ( (\sqrt{1-\delta^2})\cos(\omega_dt)+\delta \sin(\omega_dt) \right ) \right )u(t)$$
如果$\sqrt{1-\delta^2}=\sin(\theta)$,则'δ'将是cos(θ)。将这些值代入上式。
$$c(t)=\left ( 1-\frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}}(\sin(\theta)\cos(\omega_dt)+\cos(\theta)\sin(\omega_dt)) \right )u(t)$$
$$\Rightarrow c(t)=\left ( 1-\left ( \frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta) \right )u(t)$$
因此,当'δ'在零和一之间时,二阶系统的单位阶跃响应具有阻尼振荡(幅度递减)。
情况4:δ > 1
我们可以修改传递函数的分母项如下:
$$s^2+2\delta\omega_ns+\omega_n^2=\left \{ s^2+2(s)(\delta\omega_n)+(\delta\omega_n)^2 \right \}+\omega_n^2-(\delta\omega_n)^2$$
$$=\left ( s+\delta\omega_n \right )^2-\omega_n^2\left ( \delta^2-1 \right )$$
传递函数变为:
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{(s+\delta\omega_n)^2-\omega_n^2(\delta^2-1)}$$
$$\Rightarrow C(s)=\left ( \frac{\omega_n^2}{(s+\delta\omega_n)^2-\omega_n^2(\delta^2-1)} \right )R(s)$$
在上式中代入$R(s) = \frac{1}{s}$。
$C(s)=\left ( \frac{\omega_n^2}{(s+\delta\omega_n)^2-(\omega_n\sqrt{\delta^2-1})^2} \right )\left ( \frac{1}{s} \right )=\frac{\omega_n^2}{s(s+\delta\omega_n+\omega_n\sqrt{\delta^2-1})(s+\delta\omega_n-\omega_n\sqrt{\delta^2-1})}$
对C(s)进行部分分式分解。
$$C(s)=\frac{\omega_n^2}{s(s+\delta\omega_n+\omega_n\sqrt{\delta^2-1})(s+\delta\omega_n-\omega_n\sqrt{\delta^2-1})}$$
$$=\frac{A}{s}+\frac{B}{s+\delta\omega_n+\omega_n\sqrt{\delta^2-1}}+\frac{C}{s+\delta\omega_n-\omega_n\sqrt{\delta^2-1}}$$
简化后,将得到A、B和C的值分别为1、$\frac{1}{2(\delta+\sqrt{\delta^2-1})(\sqrt{\delta^2-1})}$和$\frac{-1}{2(\delta-\sqrt{\delta^2-1})(\sqrt{\delta^2-1})}$。将这些值代入C(s)的部分分式展开式。
$$C(s)=\frac{1}{s}+\frac{1}{2(\delta+\sqrt{\delta^2-1})(\sqrt{\delta^2-1})}\left ( \frac{1}{s+\delta\omega_n+\omega_n\sqrt{\delta^2-1}} \right )-\left ( \frac{1}{2(\delta-\sqrt{\delta^2-1})(\sqrt{\delta^2-1})} \right )\left ( \frac{1}{s+\delta\omega_n-\omega_n\sqrt{\delta^2-1}} \right )$$
对等式两边进行拉普拉斯反变换。
$c(t)=\left ( 1+\left ( \frac{1}{2(\delta+\sqrt{\delta^2-1})(\sqrt{\delta^2-1})} \right )e^{-(\delta\omega_n+\omega_n\sqrt{\delta^2-1})t}-\left ( \frac{1}{2(\delta-\sqrt{\delta^2-1})(\sqrt{\delta^2-1})} \right )e^{-(\delta\omega_n-\omega_n\sqrt{\delta^2-1})t} \right )u(t)$
由于它是过阻尼的,因此当δ > 1时,二阶系统的单位阶跃响应在稳态下永远不会达到阶跃输入。
二阶系统的冲激响应
可以使用以下两种方法之一获得二阶系统的冲激响应。
在推导阶跃响应的过程中,将R(s)的值视为1而不是$\frac{1}{s}$,遵循相关的步骤。
对阶跃响应进行微分。
下表显示了对于阻尼比的四种情况,二阶系统的冲激响应。
| 阻尼比条件 | t ≥ 0时的冲激响应 |
|---|---|
δ = 0 |
$\omega_n\sin(\omega_nt)$ |
δ = 1 |
$\omega_n^2te^{-\omega_nt}$ |
0 < δ < 1 |
$\left ( \frac{\omega_ne^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt)$ |
δ > 1 |
$\left ( \frac{\omega_n}{2\sqrt{\delta^2-1}} \right )\left ( e^{-(\delta\omega_n-\omega_n\sqrt{\delta^2-1})t}-e^{-(\delta\omega_n+\omega_n\sqrt{\delta^2-1})t} \right )$ |