
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气类比
- 控制系统 - 方框图
- 方框图代数
- 方框图化简
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 波特图
- 波特图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
梅森增益公式
现在让我们讨论梅森增益公式。假设信号流图中存在“N”条前向通路。信号流图的输入节点和输出节点之间的增益只不过是系统的**传递函数**。它可以通过使用梅森增益公式计算。
梅森增益公式为
T=C(s)R(s)=ΣNi=1PiΔiΔ
其中,
C(s) 是输出节点
R(s) 是输入节点
T 是R(s) 和 C(s) 之间的传递函数或增益
Pi 是第 i 个前向通路增益
Δ=1−(所有单个回路增益之和)
+(所有可能的两个互不接触回路的增益乘积之和)
−(所有可能的三个互不接触回路的增益乘积之和)+...
Δi 由 Δ 通过去除与第 i 个前向通路接触的回路得到.
为了理解这里涉及的基本术语,请考虑以下信号流图。
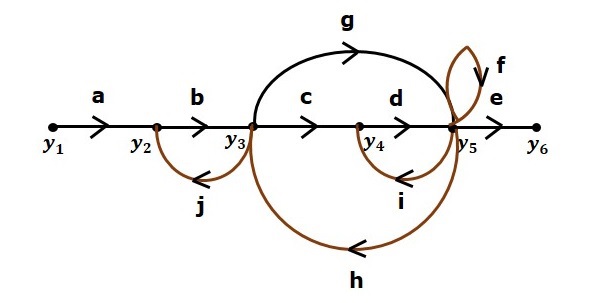
通路
它是从一个节点到任何其他节点沿着分支方向的遍历。它不应遍历任何节点超过一次。
示例 − y2→y3→y4→y5 和 y5→y3→y2
前向通路
从输入节点到输出节点存在的通路称为前向通路。
示例 − y1→y2→y3→y4→y5→y6 和 y1→y2→y3→y5→y6。
前向通路增益
它是通过计算前向通路所有分支增益的乘积获得的。
示例 − abcde 是 y1→y2→y3→y4→y5→y6 的前向通路增益,而 abge 是 y1→y2→y3→y5→y6 的前向通路增益。
回路
从一个节点开始并在同一节点结束的通路称为回路。因此,它是一个闭合通路。
示例 − y2→y3→y2 和 y3→y5→y3。
回路增益
它是通过计算回路所有分支增益的乘积获得的。
示例 − bj 是 y2→y3→y2 的回路增益,而 gh 是 y3→y5→y3 的回路增益。
互不接触回路
这些是没有任何公共节点的回路。
示例 − 回路 y2→y3→y2 和 y4→y5→y4 是互不接触的。
使用梅森增益公式计算传递函数
让我们考虑相同的信号流图来寻找传递函数。
前向通路的数量,N = 2。
第一条前向通路为 - y1→y2→y3→y4→y5→y6。
第一条前向通路增益,p1=abcde。
第二条前向通路为 - y1→y2→y3→y5→y6。
第二条前向通路增益,p2=abge。
单个回路的数量,L = 5。
回路为 - y2→y3→y2,y3→y5→y3,y3→y4→y5→y3,y4→y5→y4 和 y5→y5。
回路增益为 - l1=bj,l2=gh,l3=cdh,l4=di 和 l5=f。
两个互不接触回路的数量 = 2。
第一对互不接触回路为 - y2→y3→y2,y4→y5→y4。
第一对互不接触回路的增益乘积,l1l4=bjdi
第二对互不接触回路为 - y2→y3→y2,y5→y5。
第二对互不接触回路的增益乘积为 - l1l5=bjf
在此信号流图中不存在更高数量的(超过两个)互不接触回路。
我们知道,
Δ=1−(所有单个回路增益之和)
+(所有可能的两个互不接触回路的增益乘积之和)
−(所有可能的三个互不接触回路的增益乘积之和)+...
将这些值代入上述方程,
Δ=1−(bj+gh+cdh+di+f)+(bjdi+bjf)−(0)
⇒Δ=1−(bj+gh+cdh+di+f)+bjdi+bjf
没有与第一条前向通路互不接触的回路。
所以,Δ1=1。
类似地,Δ2=1。因为没有与第二条前向通路互不接触的回路。
将 N = 2 代入梅森增益公式
T=C(s)R(s)=Σ2i=1PiΔiΔ
T=C(s)R(s)=P1Δ1+P2Δ2Δ
将所有必要的值代入上述方程。
T=C(s)R(s)=(abcde)1+(abge)11−(bj+gh+cdh+di+f)+bjdi+bjf
⇒T=C(s)R(s)=(abcde)+(abge)1−(bj+gh+cdh+di+f)+bjdi+bjf
因此,传递函数为 -
T=C(s)R(s)=(abcde)+(abge)1−(bj+gh+cdh+di+f)+bjdi+bjf