
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 绪论
- 控制系统 - 反馈
- 数学模型
- 机械系统建模
- 机械系统的电气类比
- 控制系统 - 方框图
- 方框图代数
- 方框图化简
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 波特图
- 波特图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
机械系统建模
在本章中,让我们讨论微分方程建模在机械系统中的应用。根据运动类型,机械系统可分为两种。
- 平移机械系统
- 旋转机械系统
平移机械系统的建模
平移机械系统沿直线运动。这些系统主要由三个基本元件组成:质量、弹簧和阻尼器。
如果对平移机械系统施加一个力,那么它会受到系统质量、弹性和摩擦产生的反作用力的阻碍。由于施加的力和反作用力方向相反,因此作用在系统上的所有力的代数和为零。现在让我们分别看看这三个元件产生的反作用力。
质量
质量是物体的一种属性,它存储动能。如果对质量为M的物体施加一个力,那么它会受到质量产生的反作用力的阻碍。这个反作用力与物体的加速度成正比。假设弹性和摩擦可以忽略不计。
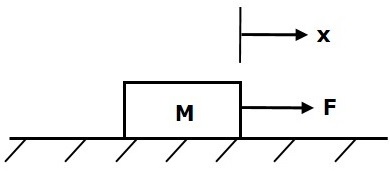
$$F_m\propto\: a$$
$$\Rightarrow F_m=Ma=M\frac{\text{d}^2x}{\text{d}t^2}$$
$$F=F_m=M\frac{\text{d}^2x}{\text{d}t^2}$$
其中,
F 为施加的力
Fm 为质量产生的反作用力
M 为质量
a 为加速度
x 为位移
弹簧
弹簧是一种存储势能的元件。如果对弹簧K施加一个力,那么它会受到弹簧弹性产生的反作用力的阻碍。这个反作用力与弹簧的位移成正比。假设质量和摩擦可以忽略不计。
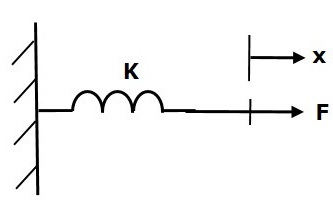
$$F\propto\: x$$
$$\Rightarrow F_k=Kx$$
$$F=F_k=Kx$$
其中,
F 为施加的力
Fk 为弹簧弹性产生的反作用力
K 为弹簧常数
x 为位移
阻尼器
如果对阻尼器B施加一个力,那么它会受到阻尼器摩擦产生的反作用力的阻碍。这个反作用力与物体的速度成正比。假设质量和弹性可以忽略不计。
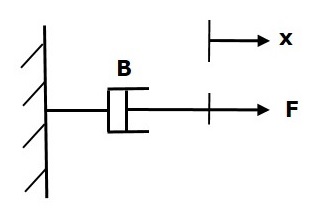
$$F_b\propto\: \nu$$
$$\Rightarrow F_b=B\nu=B\frac{\text{d}x}{\text{d}t}$$
$$F=F_b=B\frac{\text{d}x}{\text{d}t}$$
其中,
Fb 为阻尼器摩擦产生的反作用力
B 为摩擦系数
v 为速度
x 为位移
旋转机械系统的建模
旋转机械系统绕固定轴旋转。这些系统主要由三个基本元件组成:转动惯量、扭转弹簧和阻尼器。
如果对旋转机械系统施加一个力矩,那么它会受到系统转动惯量、弹性和摩擦产生的反作用力矩的阻碍。由于施加的力矩和反作用力矩方向相反,因此作用在系统上的所有力矩的代数和为零。现在让我们分别看看这三个元件产生的反作用力矩。
转动惯量
在平移机械系统中,质量存储动能。类似地,在旋转机械系统中,转动惯量存储动能。
如果对转动惯量为J的物体施加一个力矩,那么它会受到转动惯量产生的反作用力矩的阻碍。这个反作用力矩与物体的角加速度成正比。假设弹性和摩擦可以忽略不计。
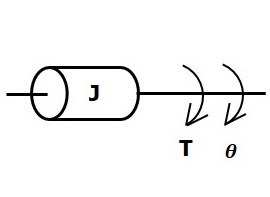
$$T_j\propto\: \alpha$$
$$\Rightarrow T_j=J\alpha=J\frac{\text{d}^2\theta}{\text{d}t^2}$$
$$T=T_j=J\frac{\text{d}^2\theta}{\text{d}t^2}$$
其中,
T 为施加的力矩
Tj 为转动惯量产生的反作用力矩
J 为转动惯量
α 为角加速度
θ 为角位移
扭转弹簧
在平移机械系统中,弹簧存储势能。类似地,在旋转机械系统中,扭转弹簧存储势能。
如果对扭转弹簧K施加一个力矩,那么它会受到扭转弹簧弹性产生的反作用力矩的阻碍。这个反作用力矩与扭转弹簧的角位移成正比。假设转动惯量和摩擦可以忽略不计。
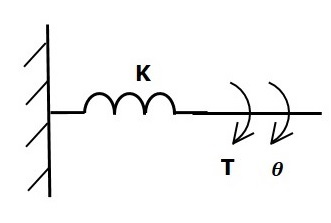
$$T_k\propto\: \theta$$
$$\Rightarrow T_k=K\theta$$
$$T=T_k=K\theta$$
其中,
T 为施加的力矩
Tk 为扭转弹簧弹性产生的反作用力矩
K 为扭转弹簧常数
θ 为角位移
阻尼器
如果对阻尼器B施加一个力矩,那么它会受到阻尼器旋转摩擦产生的反作用力矩的阻碍。这个反作用力矩与物体的角速度成正比。假设转动惯量和弹性可以忽略不计。
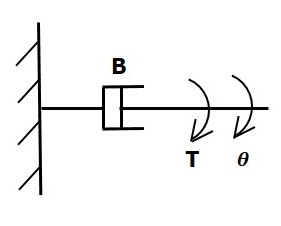
$$T_b\propto\: \omega$$
$$\Rightarrow T_b=B\omega=B\frac{\text{d}\theta}{\text{d}t}$$
$$T=T_b=B\frac{\text{d}\theta}{\text{d}t}$$
其中,
Tb 为阻尼器旋转摩擦产生的反作用力矩
B 为旋转摩擦系数
ω 为角速度
θ 为角位移