
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气等效
- 控制系统 - 方框图
- 方框图代数
- 方框图简化
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 波德图
- 波德图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 时间响应分析
我们可以分析控制系统在时域和频域的响应。我们将在后面的章节中讨论控制系统的频率响应分析。现在让我们讨论控制系统的时间响应分析。
什么是时间响应?
如果控制系统对输入的输出随时间变化,则称为控制系统的时间响应。时间响应由两部分组成。
- 暂态响应
- 稳态响应
控制系统在时域的响应如下图所示。
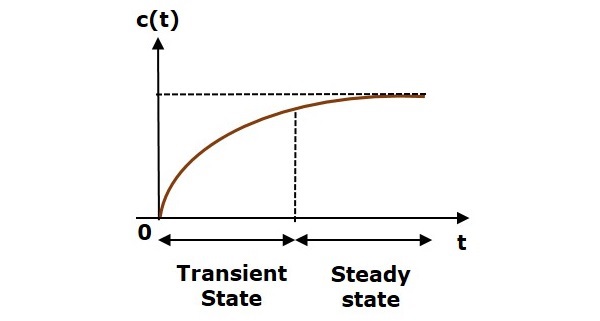
此处,图中同时指出了暂态和稳态。对应于这些状态的响应被称为暂态响应和稳态响应。
数学上,我们可以将时间响应 c(t) 写作
$$c(t)=c_{tr}(t)+c_{ss}(t)$$
其中,
- ctr(t) 是暂态响应
- css(t) 是稳态响应
暂态响应
对控制系统施加输入后,输出需要一定时间才能达到稳态。因此,在达到稳态之前,输出将处于暂态。因此,控制系统在暂态期间的响应称为**暂态响应**。
对于较大的 ‘t’ 值,暂态响应将为零。理想情况下,这个 ‘t’ 值是无穷大,实际上是五倍常数。
数学上,我们可以写成
$$\lim_{t\rightarrow \infty }c_{tr}(t)=0$$
稳态响应
即使在暂态响应对于较大的 ‘t’ 值为零之后,时间响应中仍然存在的部分称为**稳态响应**。这意味着,即使在稳态期间,暂态响应也将为零。
示例
让我们找到控制系统 $c(t)=10+5e^{-t}$ 的时间响应的暂态和稳态项。
这里,第二项 $5e^{-t}$ 当 **t** 表示无穷大时将为零。所以,这是**暂态项**。而第一项 10 即使当 **t** 趋于无穷大时仍然存在。所以,这是**稳态项**。
标准测试信号
标准测试信号包括脉冲、阶跃、斜坡和抛物线。这些信号用于使用输出的时间响应来了解控制系统的性能。
单位脉冲信号
单位脉冲信号 δ(t) 定义为
$\delta (t)=0$ 对于 $t\neq 0$
以及 $\int_{0^-}^{0^+} \delta (t)dt=1$
下图显示了单位脉冲信号。
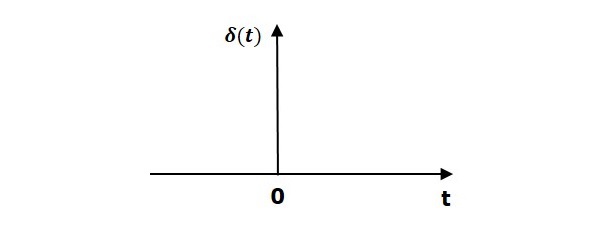
因此,单位脉冲信号仅在 ‘t’ 等于零时存在。该信号在围绕 ‘t’ 的较小时间间隔内的面积等于零为一。对于所有其他 ‘t’ 值,单位脉冲信号的值为零。
单位阶跃信号
单位阶跃信号 u(t) 定义为
$$u(t)=1;t\geq 0$$
$=0; t<0$
下图显示了单位阶跃信号。
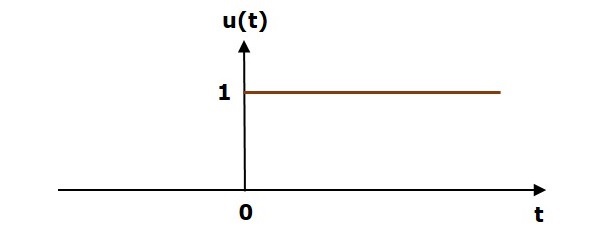
因此,单位阶跃信号存在于所有正 ‘t’ 值(包括零)中。并且在此区间内其值为一。对于所有负 ‘t’ 值,单位阶跃信号的值为零。
单位斜坡信号
单位斜坡信号 r(t) 定义为
$$r(t)=t; t\geq 0$$
$=0; t<0$
我们可以用单位阶跃信号 u(t) 来表示单位斜坡信号 r(t),如下所示:
$$r(t)=tu(t)$$
下图显示了单位斜坡信号。
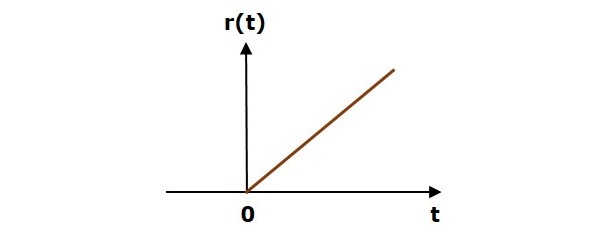
因此,单位斜坡信号存在于所有正 ‘t’ 值(包括零)中。并且在此区间内其值随 ‘t’ 线性增加。对于所有负 ‘t’ 值,单位斜坡信号的值为零。
单位抛物线信号
单位抛物线信号 p(t) 定义为:
$$p(t)=\frac{t^2}{2}; t\geq 0$$
$=0; t<0$
我们可以用单位阶跃信号 u(t) 来表示单位抛物线信号 p(t),如下所示:
$$p(t)=\frac{t^2}{2}u(t)$$
下图显示了单位抛物线信号。
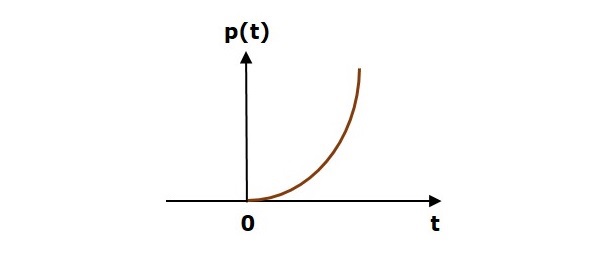
因此,单位抛物线信号存在于所有正 **‘t’** 值(包括零)中。并且在此区间内其值随 ‘t’ 非线性增加。对于所有负 ‘t’ 值,单位抛物线信号的值为零。