
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气类比
- 控制系统 - 方框图
- 方框图代数
- 方框图化简
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频率响应分析
- 控制系统 - 伯德图
- 伯德图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
时域指标
在本章中,让我们讨论二阶系统的时域指标。下图显示了二阶系统在欠阻尼情况下的阶跃响应。
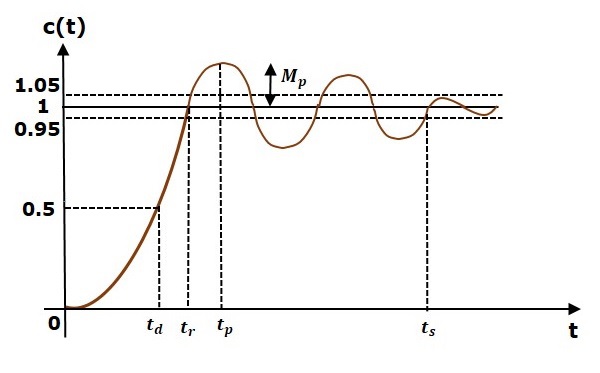
所有时域指标都在此图中表示。响应达到稳定时间之前的部分称为瞬态响应,响应达到稳定时间之后的部分称为稳态响应。
延迟时间
从零时刻开始,响应达到**其最终值的一半**所需的时间。用 $t_d$ 表示。
考虑二阶系统在 t ≥ 0 时的阶跃响应,其中 'δ' 在 0 和 1 之间。
$$c(t)=1-\left ( \frac{e^{-\delta \omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
阶跃响应的最终值为 1。
因此,在 $t=t_d$ 时,阶跃响应的值将为 0.5。将这些值代入上述方程。
$$c(t_d)=0.5=1-\left ( \frac{e^{-\delta\omega_nt_d}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_d+\theta)$$
$$\Rightarrow \left ( \frac{e^{-\delta\omega_nt_d}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_d+\theta)=0.5$$
使用线性近似,可以得到**延迟时间 td** 为
$$t_d=\frac{1+0.7\delta}{\omega_n}$$
上升时间
响应从**其最终值的 0% 上升到 100%** 所需的时间。这适用于**欠阻尼系统**。对于过阻尼系统,考虑从最终值的 10% 到 90% 的持续时间。上升时间用**tr**表示。
在 t = t1 = 0 时,c(t) = 0。
我们知道阶跃响应的最终值为 1。
因此,在 $t = t_2$ 时,阶跃响应的值为 1。将这些值代入以下方程。
$$c(t)=1-\left ( \frac{e^{-\delta \omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
$$c(t_2)=1=1-\left ( \frac{e^{-\delta\omega_nt_2}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_2+\theta)$$
$$\Rightarrow \left ( \frac{e^{-\delta\omega_nt_2}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_2+\theta)=0$$
$$\Rightarrow \sin(\omega_dt_2+\theta)=0$$
$$\Rightarrow \omega_dt_2+\theta=\pi$$
$$\Rightarrow t_2=\frac{\pi-\theta}{\omega_d}$$
将 t1 和 t2 的值代入以下**上升时间**方程,
$$t_r=t_2-t_1$$
$$\therefore \: t_r=\frac{\pi-\theta}{\omega_d}$$
从上述方程可以得出,上升时间 $t_r$ 和阻尼频率 $\omega_d$ 成反比。
峰值时间
响应第一次达到**峰值**所需的时间。用 $t_p$ 表示。在 $t = t_p$ 时,响应的一阶导数为零。
我们知道欠阻尼情况下二阶系统的阶跃响应为
$$c(t)=1-\left ( \frac{e^{-\delta \omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
对 $c(t)$ 求关于 't' 的导数。
$$\frac{\text{d}c(t)}{\text{d}t}=-\left ( \frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\omega_d\cos(\omega_dt+\theta)-\left ( \frac{-\delta\omega_ne^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
将 $t=t_p$ 和 $\frac{\text{d}c(t)}{\text{d}t}=0$ 代入上述方程。
$$0=-\left ( \frac{e^{-\delta\omega_nt_p}}{\sqrt{1-\delta^2}} \right )\left [ \omega_d\cos(\omega_dt_p+\theta)-\delta\omega_n\sin(\omega_dt_p+\theta) \right ]$$
$$\Rightarrow \omega_n\sqrt{1-\delta^2}\cos(\omega_dt_p+\theta)-\delta\omega_n\sin(\omega_dt_p+\theta)=0$$
$$\Rightarrow \sqrt{1-\delta^2}\cos(\omega_dt_p+\theta)-\delta\sin(\omega_dt_p+\theta)=0$$
$$\Rightarrow \sin(\theta)\cos(\omega_dt_p+\theta)-\cos(\theta)\sin(\omega_dt_p+\theta)=0$$
$$\Rightarrow \sin(\theta-\omega_dt_p-\theta)=0$$
$$\Rightarrow sin(-\omega_dt_p)=0\Rightarrow -\sin(\omega_dt_p)=0\Rightarrow sin(\omega_dt_p)=0$$
$$\Rightarrow \omega_dt_p=\pi$$
$$\Rightarrow t_p=\frac{\pi}{\omega_d}$$
从上述方程可以得出,峰值时间 $t_p$ 和阻尼频率 $\omega_d$ 成反比。
峰值超调量
峰值超调量 **Mp** 定义为响应在峰值时间处的偏差与响应的最终值之差。也称为**最大超调量**。
数学上,可以写成
$$M_p=c(t_p)-c(\infty)$$
其中,
c(tp) 是响应的峰值。
c(∞) 是响应的最终(稳态)值。
在 $t = t_p$ 时,响应 c(t) 为 -
$$c(t_p)=1-\left ( \frac{e^{-\delta\omega_nt_p}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_p+\theta)$$
将 $t_p=\frac{\pi}{\omega_d}$ 代入上述方程的右侧。
$$c(t_P)=1-\left ( \frac{e^{-\delta\omega_n\left ( \frac{\pi}{\omega_d} \right )}}{\sqrt{1-\delta^2}} \right )\sin\left ( \omega_d\left ( \frac{\pi}{\omega_d} \right ) +\theta\right )$$
$$\Rightarrow c(t_p)=1-\left ( \frac{e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}}{\sqrt{1-\delta^2}} \right )(-\sin(\theta))$$
我们知道
$$\sin(\theta)=\sqrt{1-\delta^2}$$
所以,我们将得到 c(tp) 为
$$c(t_p)=1+e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}$$
将 $c(t_p)$ 和 $c(\infty)$ 的值代入峰值超调量方程。
$$M_p=1+e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}-1$$
$$\Rightarrow M_p=e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}$$
**峰值超调量的百分比 %** $M_p$ 可以用此公式计算。
$$\%M_p=\frac{M_p}{c(\infty )}\times 100\%$$
将 $M_p$ 和 $c(\infty)$ 的值代入上述公式,我们将得到峰值超调量的百分比 $\%M_p$ 为
$$\%M_p=\left ( e^ {-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )} \right )\times 100\%$$
从上述方程可以得出,如果阻尼比 $\delta$ 增大,则峰值超调量的百分比 $\% M_p$ 将减小。
稳定时间
响应达到稳态并在最终值周围的指定容差范围内保持的时间。通常,容差范围为 2% 和 5%。稳定时间用 $t_s$ 表示。
5% 容差范围的稳定时间为 -
$$t_s=\frac{3}{\delta\omega_n}=3\tau$$
2% 容差范围的稳定时间为 -
$$t_s=\frac{4}{\delta\omega_n}=4\tau$$
其中,$\tau$ 为时间常数,等于 $\frac{1}{\delta\omega_n}$。
稳定时间 $t_s$ 和时间常数 $\tau$ 均与阻尼比 $\delta$ 成反比。
稳定时间 $t_s$ 和时间常数 $\tau$ 均与系统增益无关。这意味着即使系统增益发生变化,稳定时间 $t_s$ 和时间常数 $\tau$ 也不会改变。
示例
现在让我们找到一个控制系统的时域指标,该系统具有闭环传递函数 $\frac{4}{s^2+2s+4}$,当单位阶跃信号作为输入应用于该控制系统时。
我们知道二阶闭环控制系统的传递函数的标准形式为
$$\frac{\omega_n^2}{s^2+2\delta\omega_ns+\omega_n^2}$$
通过将这两个传递函数相等,我们将得到无阻尼自然频率 $\omega_n$ 为 2 rad/sec,阻尼比 $\delta$ 为 0.5。
我们知道阻尼频率 $\omega_d$ 的公式为
$$\omega_d=\omega_n\sqrt{1-\delta^2}$$
将 $\omega_n$ 和 $\delta$ 的值代入上述公式。
$$\Rightarrow \omega_d=2\sqrt{1-(0.5)^2}$$
$$\Rightarrow \omega_d=1.732 \: rad/sec$$
将 $\delta$ 的值代入以下关系
$$\theta=\cos^{-1}\delta$$
$$\Rightarrow \theta=\cos^{-1}(0.5)=\frac{\pi}{3}\:rad$$
将上述必要的值代入每个时域指标的公式并进行简化,以便获得给定传递函数的时域指标的值。
下表显示了时域指标的公式、必要值的代入和最终值。
| 时域指标 | 公式 | 在公式中代入的值 | 最终值 |
|---|---|---|---|
延迟时间 |
$t_d=\frac{1+0.7\delta}{\omega_n}$ |
$t_d=\frac{1+0.7(0.5)}{2}$ |
$t_d$=0.675 秒 |
上升时间 |
$t_r=\frac{\pi-\theta}{\omega_d}$ |
$t_r=\frac{\pi-(\frac{\pi}{3})}{1.732}$ |
$t_r$=1.207 秒 |
峰值时间 |
$t_p=\frac{\pi}{\omega_d}$ |
$t_p=\frac{\pi}{1.732}$ |
$t_p$=1.813 秒 |
% 峰值超调量 |
$\%M_p=\left( e^{-\left (\frac{\delta\pi}{\sqrt{1-\delta^2}} \right ) }\right )\times 100\%$ |
$\%M_p=\left( e^{-\left (\frac{0.5\pi}{\sqrt{1-(0.5)^2}} \right ) }\right )\times 100\%$ |
$\% \: M_p$=16.32% |
2% 容差范围的稳定时间 |
$t_s=\frac{4}{\delta\omega_n}$ |
$t_S=\frac{4}{(0.5)(2)}$ |
$t_s$=4 秒 |