
- 控制系统教程
- 控制系统 - 首页
- 控制系统 - 绪论
- 控制系统 - 反馈
- 数学模型
- 机械系统的建模
- 机械系统的电气等效
- 控制系统 - 方块图
- 方块图代数
- 方块图简化
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统的响应
- 时域指标
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的绘制
- 频响分析
- 控制系统 - 波德图
- 波德图的绘制
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 信号流图
信号流图是代数方程的图形表示。本章将讨论与信号流图相关的基本概念,并学习如何绘制信号流图。
信号流图的基本元素
节点和分支是信号流图的基本元素。
节点
节点是一个点,表示变量或信号。节点有三种类型:输入节点、输出节点和混合节点。
输入节点- 只有输出分支的节点。
输出节点- 只有输入分支的节点。
混合节点- 既有输入分支也有输出分支的节点。
示例
让我们考虑以下信号流图来识别这些节点。
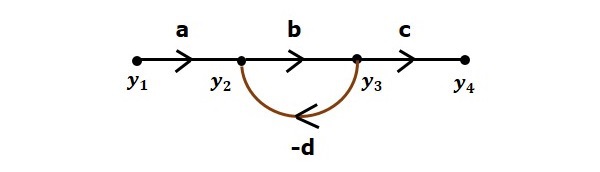
此信号流图中的节点为y1, y2, y3和y4。
y1和y4分别是输入节点和输出节点。
y2和y3是混合节点。
分支
分支是连接两个节点的线段。它既有增益也有方向。例如,上述信号流图中有四个分支。这些分支的增益为a, b, c和-d。
信号流图的绘制
让我们考虑以下代数方程来绘制信号流图:
$$y_2=a_{12}y_1+a_{42}y_4$$
$$y_3=a_{23}y_2+a_{53}y_5$$
$$y_4=a_{34}y_3$$
$$y_5=a_{45}y_4+a_{35}y_3$$
$$y_6=a_{56}y_5$$
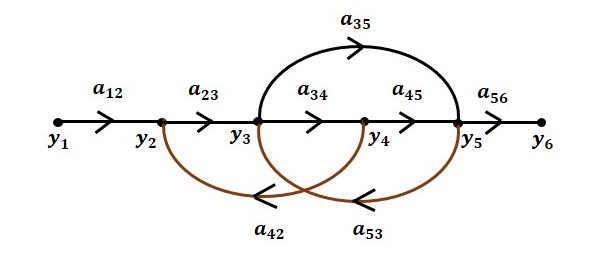
该信号流图将有六个节点(y1, y2, y3, y4, y5和y6)和八个分支。分支的增益为a12, a23, a34, a45, a56, a42, a53和a35。
要获得整体信号流图,请为每个方程绘制信号流图,然后组合所有这些信号流图,然后按照以下步骤操作:
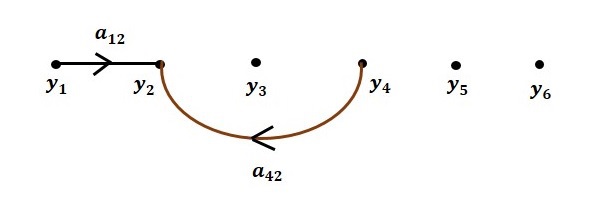
步骤 1 - $y_2 = a_{13}y_1 + a_{42}y_4$ 的信号流图如下所示。
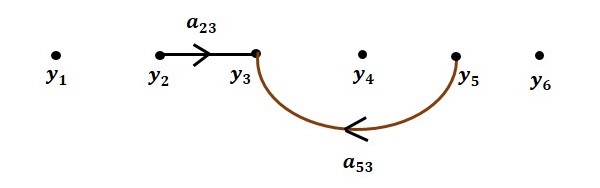
步骤 2 - $y_3 = a_{23}y_2 + a_{53}y_5$ 的信号流图如下所示。
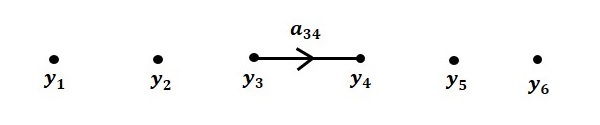
步骤 3 - $y_4 = a_{34}y_3$ 的信号流图如下所示。
步骤 4 - $y_5 = a_{45}y_4 + a_{35}y_3$ 的信号流图如下所示。
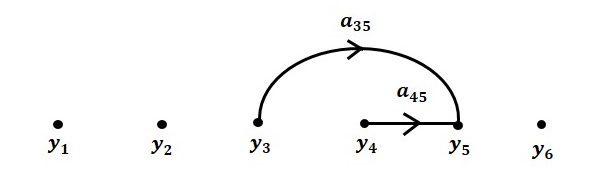
步骤 5 - $y_6 = a_{56}y_5$ 的信号流图如下所示。

步骤 6 - 整体系统的信号流图如下所示。
将方块图转换为信号流图
按照以下步骤将方块图转换为其等效信号流图。
将方块图的所有信号、变量、加法点和取样点表示为信号流图中的节点。
将方块图中的方块表示为信号流图中的分支。
将方块图中方块内的传递函数表示为信号流图中分支的增益。
根据方块图连接节点。如果两个节点之间有连接(但中间没有方块),则将分支的增益表示为1。例如,加法点之间,加法点和取样点之间,输入和加法点之间,取样点和输出之间。
示例
让我们将下面的方块图转换为其等效信号流图。
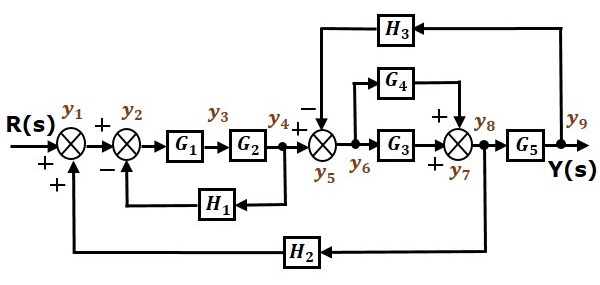
将方块图的输入信号$R(s)$和输出信号$C(s)$表示为信号流图的输入节点$R(s)$和输出节点$C(s)$。
仅供参考,方块图中标注了其余节点(y1到y9)。除了输入和输出节点外,还有九个节点。即四个加法点的四个节点,四个取样点的四个节点,以及$G_1$和$G_2$方块之间的变量的一个节点。
下图显示了等效信号流图。
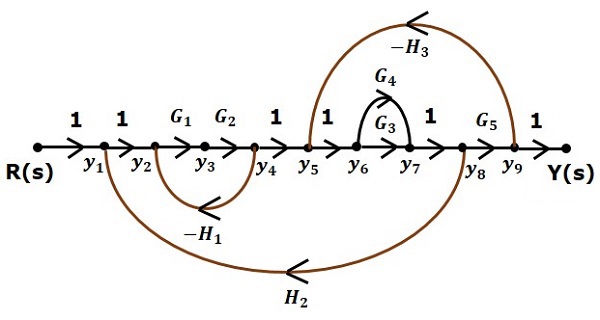
借助梅森增益公式(下一章讨论),您可以计算此信号流图的传递函数。这是信号流图的优势。在这里,我们不需要简化(简化)信号流图来计算传递函数。