- 数字信号处理教程
- 数字信号处理 - 首页
- 数字信号处理 - 信号定义
- 数字信号处理 - 基本连续时间信号
- 数字信号处理 - 基本离散时间信号
- 数字信号处理 - 连续时间信号的分类
- 数字信号处理 - 离散时间信号的分类
- 数字信号处理 - 其他信号
- 基本系统特性
- 数字信号处理 - 静态系统
- 数字信号处理 - 动态系统
- 数字信号处理 - 因果系统
- 数字信号处理 - 非因果系统
- 数字信号处理 - 反因果系统
- 数字信号处理 - 线性系统
- 数字信号处理 - 非线性系统
- 数字信号处理 - 时不变系统
- 数字信号处理 - 时变系统
- 数字信号处理 - 稳定系统
- 数字信号处理 - 不稳定系统
- 数字信号处理 - 例题解析
- 数字信号处理资源
- 数字信号处理 - 快速指南
- 数字信号处理 - 有用资源
- 数字信号处理 - 讨论
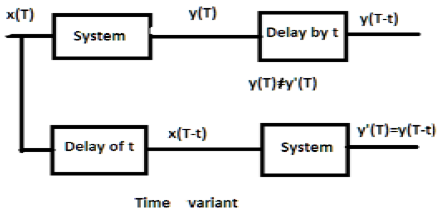
数字信号处理 - 时变系统
对于时变系统,输出和输入也应该延迟一段时间常数,但输入端的延迟不应该反映在输出端。所有时间尺度变换的情况都是时变系统的例子。类似地,当系统关系中的系数是时间的函数时,系统也是时变的。
示例
a) $y(t) = x[\cos T]$
如果上述信号先通过系统再通过时间延迟,则输出将为$x\cos (T-t)$。如果它先通过时间延迟再通过系统,则输出将为$x(\cos T-t)$。由于输出不相同,因此系统是时变的。
b) $y(T) = \cos T.x(T)$
如果上述表达式先通过系统再通过时间延迟,则输出将为$\cos(T-t)x(T-t)$。但是,如果表达式先通过时间延迟再通过系统,则输出将为$\cos T.x(T-t)$。由于输出不相同,很明显系统是时变的。
广告