- 数据结构与算法
- DSA - 首页
- DSA - 概述
- DSA - 环境设置
- DSA - 算法基础
- DSA - 渐进分析
- 数据结构
- DSA - 数据结构基础
- DSA - 数据结构和类型
- DSA - 数组数据结构
- 链表
- DSA - 链表数据结构
- DSA - 双向链表数据结构
- DSA - 循环链表数据结构
- 栈与队列
- DSA - 栈数据结构
- DSA - 表达式解析
- DSA - 队列数据结构
- 搜索算法
- DSA - 搜索算法
- DSA - 线性搜索算法
- DSA - 二分搜索算法
- DSA - 插值搜索
- DSA - 跳跃搜索算法
- DSA - 指数搜索
- DSA - 斐波那契搜索
- DSA - 子列表搜索
- DSA - 哈希表
- 排序算法
- DSA - 排序算法
- DSA - 冒泡排序算法
- DSA - 插入排序算法
- DSA - 选择排序算法
- DSA - 归并排序算法
- DSA - 希尔排序算法
- DSA - 堆排序
- DSA - 桶排序算法
- DSA - 计数排序算法
- DSA - 基数排序算法
- DSA - 快速排序算法
- 图数据结构
- DSA - 图数据结构
- DSA - 深度优先遍历
- DSA - 广度优先遍历
- DSA - 生成树
- 树数据结构
- DSA - 树数据结构
- DSA - 树的遍历
- DSA - 二叉搜索树
- DSA - AVL树
- DSA - 红黑树
- DSA - B树
- DSA - B+树
- DSA - 伸展树
- DSA - 字典树
- DSA - 堆数据结构
- 递归
- DSA - 递归算法
- DSA - 使用递归的汉诺塔问题
- DSA - 使用递归的斐波那契数列
- 分治法
- DSA - 分治法
- DSA - 最大-最小问题
- DSA - Strassen矩阵乘法
- DSA - Karatsuba算法
- 贪心算法
- DSA - 贪心算法
- DSA - 旅行商问题(贪心算法)
- DSA - Prim最小生成树
- DSA - Kruskal最小生成树
- DSA - Dijkstra最短路径算法
- DSA - 地图着色算法
- DSA - 分数背包问题
- DSA - 带截止日期的作业排序
- DSA - 最优合并模式算法
- 动态规划
- DSA - 动态规划
- DSA - 矩阵链乘法
- DSA - Floyd-Warshall算法
- DSA - 0-1背包问题
- DSA - 最长公共子序列算法
- DSA - 旅行商问题(动态规划方法)
- 近似算法
- DSA - 近似算法
- DSA - 顶点覆盖算法
- DSA - 集合覆盖问题
- DSA - 旅行商问题(近似算法)
- 随机算法
- DSA - 随机算法
- DSA - 随机快速排序算法
- DSA - Karger最小割算法
- DSA - Fisher-Yates洗牌算法
- DSA 有用资源
- DSA - 问答
- DSA - 快速指南
- DSA - 有用资源
- DSA - 讨论
使用近似算法的旅行商问题

我们已经讨论了使用贪心和动态规划方法解决旅行商问题,并且已经确定在多项式时间内无法找到旅行商问题的完美最优解。
因此,期望近似解能够找到此 NP-Hard 问题的近似最优解。但是,只有当问题中的成本函数(定义为两个绘图点之间的距离)满足三角不等式时,才会设计近似算法。
只有当成本函数 c 对于三角形 u、v 和 w 的所有顶点都满足以下等式时,才满足三角不等式
c(u, w)≤ c(u, v)+c(v, w)
在许多应用中,它通常会自动满足。
旅行商近似算法
旅行商近似算法需要执行一些先决条件算法,以便我们能够获得近似最优解。让我们简要了解一下这些先决条件算法:
最小生成树 - 最小生成树是一种树形数据结构,它包含主图的所有顶点,以及连接它们的最小数量的边。在这种情况下,我们应用 Prim 算法来生成最小生成树。
先序遍历 - 先序遍历是在树形数据结构上进行的,其中一个指针以 [根 - 左孩子 - 右孩子] 的顺序遍历树的所有节点。
算法
步骤 1 - 随机选择给定图中的任意顶点作为起点和终点。
步骤 2 - 使用 Prim 算法构建以所选顶点为根的图的最小生成树。
步骤 3 - 一旦构建了生成树,就在上一步获得的最小生成树上执行先序遍历。
步骤 4 - 获得的先序解是旅行商的哈密顿路径。
伪代码
APPROX_TSP(G, c)
r <- root node of the minimum spanning tree
T <- MST_Prim(G, c, r)
visited = {ф}
for i in range V:
H <- Preorder_Traversal(G)
visited = {H}
分析
如果满足三角不等式,则旅行商问题的近似算法是 2-近似算法。
为了证明这一点,我们需要证明问题的近似成本是最佳成本的两倍。以下是一些支持此论断的观察结果:
最小生成树的成本永远不会小于最优哈密顿路径的成本。也就是说,c(M) ≤ c(H*)。
完整遍历的成本也是最小生成树成本的两倍。完整遍历定义为按先序遍历最小生成树时所描绘的路径。完整遍历精确地遍历图中的每条边两次。因此,c(W) = 2c(T)
由于先序遍历路径小于完整遍历路径,因此算法的输出始终低于完整遍历的成本。
示例
让我们看一个示例图来可视化此近似算法:
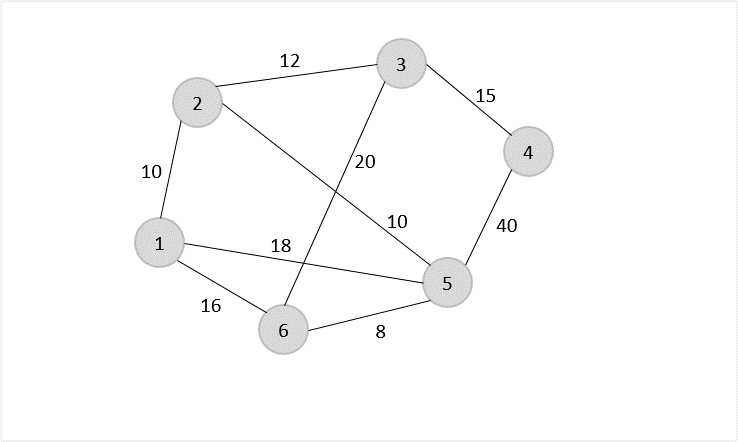
解决方案
从上图中考虑顶点 1 作为旅行商的起点和终点,并从此处开始算法。
步骤 1
从顶点 1 开始算法,从图中构建一个最小生成树。要了解有关构建最小生成树的更多信息,请点击此处。
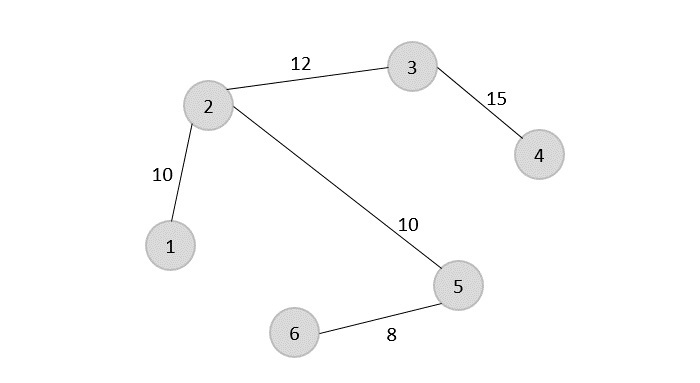
步骤 2
一旦构建了最小生成树,就将起始顶点视为根节点(即顶点 1),并按先序遍历生成树。
旋转生成树以方便解释,我们得到:
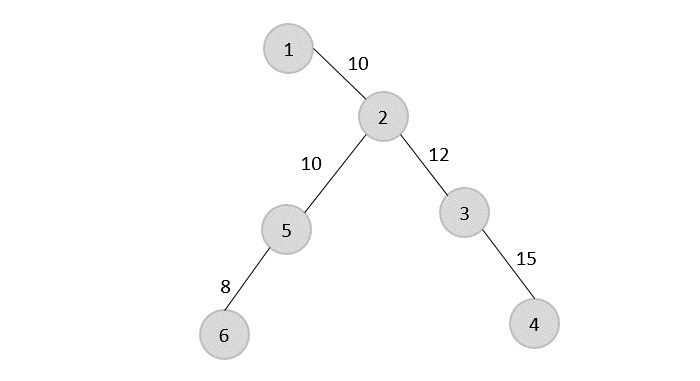
发现树的先序遍历为:1 → 2 → 5 → 6 → 3 → 4
步骤 3
在追踪路径的末尾添加根节点,我们得到1 → 2 → 5 → 6 → 3 → 4 → 1
这是旅行商近似问题的输出哈密顿路径。路径的成本将是最小生成树中所有成本的总和,即55。
实施
以下是上述方法在各种编程语言中的实现:
#include <stdio.h>
#include <stdbool.h>
#include <limits.h>
#define V 6 // Number of vertices in the graph
// Function to find the minimum key vertex from the set of vertices not yet included in MST
int findMinKey(int key[], bool mstSet[]) {
int min = INT_MAX, min_index;
for (int v = 0; v < V; v++) {
if (mstSet[v] == false && key[v] < min) {
min = key[v];
min_index = v;
}
}
return min_index;
}
// Function to perform Prim's algorithm to find the Minimum Spanning Tree (MST)
void primMST(int graph[V][V], int parent[]) {
int key[V];
bool mstSet[V];
for (int i = 0; i < V; i++) {
key[i] = INT_MAX;
mstSet[i] = false;
}
key[0] = 0;
parent[0] = -1;
for (int count = 0; count < V - 1; count++) {
int u = findMinKey(key, mstSet);
mstSet[u] = true;
for (int v = 0; v < V; v++) {
if (graph[u][v] && mstSet[v] == false && graph[u][v] < key[v]) {
parent[v] = u;
key[v] = graph[u][v];
}
}
}
}
// Function to print the preorder traversal of the Minimum Spanning Tree
void printPreorderTraversal(int parent[]) {
printf("The preorder traversal of the tree is found to be − ");
for (int i = 1; i < V; i++) {
printf("%d → ", parent[i]);
}
printf("\n");
}
// Main function for the Traveling Salesperson Approximation Algorithm
void tspApproximation(int graph[V][V]) {
int parent[V];
int root = 0; // Choosing vertex 0 as the starting and ending point
// Find the Minimum Spanning Tree using Prim's Algorithm
primMST(graph, parent);
// Print the preorder traversal of the Minimum Spanning Tree
printPreorderTraversal(parent);
// Print the Hamiltonian path (preorder traversal with the starting point added at the end)
printf("Adding the root node at the end of the traced path ");
for (int i = 0; i < V; i++) {
printf("%d → ", parent[i]);
}
printf("%d → %d\n", root, parent[0]);
// Calculate and print the cost of the Hamiltonian path
int cost = 0;
for (int i = 1; i < V; i++) {
cost += graph[parent[i]][i];
}
// The cost of the path would be the sum of all the costs in the minimum spanning tree.
printf("Sum of all the costs in the minimum spanning tree %d.\n", cost);
}
int main() {
// Example graph represented as an adjacency matrix
int graph[V][V] = {
{0, 3, 1, 6, 0, 0},
{3, 0, 5, 0, 3, 0},
{1, 5, 0, 5, 6, 4},
{6, 0, 5, 0, 0, 2},
{0, 3, 6, 0, 0, 6},
{0, 0, 4, 2, 6, 0}
};
tspApproximation(graph);
return 0;
}
输出
The preorder traversal of the tree is found to be − 0 → 0 → 5 → 1 → 2 → Adding the root node at the end of the traced path -1 → 0 → 0 → 5 → 1 → 2 → 0 → -1 Sum of all the costs in the minimum spanning tree 13.
#include <iostream>
#include <limits>
#define V 6 // Number of vertices in the graph
// Function to find the minimum key vertex from the set of vertices not yet included in MST
int findMinKey(int key[], bool mstSet[]) {
int min = std::numeric_limits<int>::max();
int min_index;
for (int v = 0; v < V; v++) {
if (mstSet[v] == false && key[v] < min) {
min = key[v];
min_index = v;
}
}
return min_index;
}
// Function to perform Prim's algorithm to find the Minimum Spanning Tree (MST)
void primMST(int graph[V][V], int parent[]) {
int key[V];
bool mstSet[V];
for (int i = 0; i < V; i++) {
key[i] = std::numeric_limits<int>::max();
mstSet[i] = false;
}
key[0] = 0;
parent[0] = -1;
for (int count = 0; count < V - 1; count++) {
int u = findMinKey(key, mstSet);
mstSet[u] = true;
for (int v = 0; v < V; v++) {
if (graph[u][v] && mstSet[v] == false && graph[u][v] < key[v]) {
parent[v] = u;
key[v] = graph[u][v];
}
}
}
}
// Function to print the preorder traversal of the Minimum Spanning Tree
void printPreorderTraversal(int parent[]) {
std::cout << "The preorder traversal of the tree is found to be − ";
for (int i = 1; i < V; i++) {
std::cout << parent[i] << " → ";
}
std::cout << std::endl;
}
// Main function for the Traveling Salesperson Approximation Algorithm
void tspApproximation(int graph[V][V]) {
int parent[V];
int root = 0; // Choosing vertex 0 as the starting and ending point
// Find the Minimum Spanning Tree using Prim's Algorithm
primMST(graph, parent);
// Print the preorder traversal of the Minimum Spanning Tree
printPreorderTraversal(parent);
// Print the Hamiltonian path (preorder traversal with the starting point added at the end)
std::cout << "Adding the root node at the end of the traced path ";
for (int i = 0; i < V; i++) {
std::cout << parent[i] << " → ";
}
std::cout << root << " → " << parent[0] << std::endl;
// Calculate and print the cost of the Hamiltonian path
int cost = 0;
for (int i = 1; i < V; i++) {
cost += graph[parent[i]][i];
}
// The cost of the path would be the sum of all the costs in the minimum spanning tree.
std::cout << "Sum of all the costs in the minimum spanning tree: " << cost << "." << std::endl;
}
int main() {
// Example graph represented as an adjacency matrix
int graph[V][V] = {
{0, 3, 1, 6, 0, 0},
{3, 0, 5, 0, 3, 0},
{1, 5, 0, 5, 6, 4},
{6, 0, 5, 0, 0, 2},
{0, 3, 6, 0, 0, 6},
{0, 0, 4, 2, 6, 0}
};
tspApproximation(graph);
return 0;
}
输出
The preorder traversal of the tree is found to be − 0 → 0 → 5 → 1 → 2 → Adding the root node at the end of the traced path -1 → 0 → 0 → 5 → 1 → 2 → 0 → -1 Sum of all the costs in the minimum spanning tree: 13.
import java.util.Arrays;
public class TravelingSalesperson {
static final int V = 6; // Number of vertices in the graph
// Function to find the minimum key vertex from the set of vertices not yet included in MST
static int findMinKey(int key[], boolean mstSet[]) {
int min = Integer.MAX_VALUE;
int minIndex = -1;
for (int v = 0; v < V; v++) {
if (!mstSet[v] && key[v] < min) {
min = key[v];
minIndex = v;
}
}
return minIndex;
}
// Function to perform Prim's algorithm to find the Minimum Spanning Tree (MST)
static void primMST(int graph[][], int parent[]) {
int key[] = new int[V];
boolean mstSet[] = new boolean[V];
Arrays.fill(key, Integer.MAX_VALUE);
Arrays.fill(mstSet, false);
key[0] = 0;
parent[0] = -1;
for (int count = 0; count < V - 1; count++) {
int u = findMinKey(key, mstSet);
mstSet[u] = true;
for (int v = 0; v < V; v++) {
if (graph[u][v] != 0 && !mstSet[v] && graph[u][v] < key[v]) {
parent[v] = u;
key[v] = graph[u][v];
}
}
}
}
// Function to print the preorder traversal of the Minimum Spanning Tree
static void printPreorderTraversal(int parent[]) {
System.out.print("The preorder traversal of the tree is found to be ");
for (int i = 1; i < V; i++) {
System.out.print(parent[i] + " -> ");
}
System.out.println();
}
// Main function for the Traveling Salesperson Approximation Algorithm
static void tspApproximation(int graph[][]) {
int parent[] = new int[V];
int root = 0; // Choosing vertex 0 as the starting and ending point
// Find the Minimum Spanning Tree using Prim's Algorithm
primMST(graph, parent);
// Print the preorder traversal of the Minimum Spanning Tree
printPreorderTraversal(parent);
// Print the Hamiltonian path (preorder traversal with the starting point added at the end)
System.out.print("Adding the root node at the end of the traced path ");
for (int i = 0; i < V; i++) {
System.out.print(parent[i] + " -> ");
}
System.out.println(root + " " + parent[0]);
// Calculate and print the cost of the Hamiltonian path
int cost = 0;
for (int i = 1; i < V; i++) {
cost += graph[parent[i]][i];
}
// The cost of the path would be the sum of all the costs in the minimum spanning tree.
System.out.println("Sum of all the costs in the minimum spanning tree: " + cost);
}
public static void main(String[] args) {
// Example graph represented as an adjacency matrix
int graph[][] = {
{0, 3, 1, 6, 0, 0},
{3, 0, 5, 0, 3, 0},
{1, 5, 0, 5, 6, 4},
{6, 0, 5, 0, 0, 2},
{0, 3, 6, 0, 0, 6},
{0, 0, 4, 2, 6, 0}
};
tspApproximation(graph);
}
}
输出
The preorder traversal of the tree is found to be 0 -> 0 -> 5 -> 1 -> 2 -> Adding the root node at the end of the traced path -1 -> 0 -> 0 -> 5 -> 1 -> 2 -> 0 -1 Sum of all the costs in the minimum spanning tree: 13
import sys
V = 6 # Number of vertices in the graph
# Function to find the minimum key vertex from the set of vertices not yet included in MST
def findMinKey(key, mstSet):
min_val = sys.maxsize
min_index = -1
for v in range(V):
if not mstSet[v] and key[v] < min_val:
min_val = key[v]
min_index = v
return min_index
# Function to perform Prim's algorithm to find the Minimum Spanning Tree (MST)
def primMST(graph, parent):
key = [sys.maxsize] * V
mstSet = [False] * V
key[0] = 0
parent[0] = -1
for _ in range(V - 1):
u = findMinKey(key, mstSet)
mstSet[u] = True
for v in range(V):
if graph[u][v] and not mstSet[v] and graph[u][v] < key[v]:
parent[v] = u
key[v] = graph[u][v]
# Function to print the preorder traversal of the Minimum Spanning Tree
def printPreorderTraversal(parent):
print("The preorder traversal of the tree is found to be − ", end="")
for i in range(1, V):
print(parent[i], " → ", end="")
print()
# Main function for the Traveling Salesperson Approximation Algorithm
def tspApproximation(graph):
parent = [0] * V
root = 0 # Choosing vertex 0 as the starting and ending point
# Find the Minimum Spanning Tree using Prim's Algorithm
primMST(graph, parent)
# Print the preorder traversal of the Minimum Spanning Tree
printPreorderTraversal(parent)
# Print the Hamiltonian path (preorder traversal with the starting point added at the end)
print("Adding the root node at the end of the traced path ", end="")
for i in range(V):
print(parent[i], " → ", end="")
print(root, " → ", parent[0])
# Calculate and print the cost of the Hamiltonian path
cost = 0
for i in range(1, V):
cost += graph[parent[i]][i]
# The cost of the path would be the sum of all the costs in the minimum spanning tree.
print("Sum of all the costs in the minimum spanning tree:", cost)
if __name__ == "__main__":
# Example graph represented as an adjacency matrix
graph = [
[0, 3, 1, 6, 0, 0],
[3, 0, 5, 0, 3, 0],
[1, 5, 0, 5, 6, 4],
[6, 0, 5, 0, 0, 2],
[0, 3, 6, 0, 0, 6],
[0, 0, 4, 2, 6, 0]
]
tspApproximation(graph)
输出
The preorder traversal of the tree is found to be − 0 → 0 → 5 → 1 → 2 → Adding the root node at the end of the traced path -1 → 0 → 0 → 5 → 1 → 2 → 0 → -1 Sum of all the costs in the minimum spanning tree: 13